
- 研究車輛分散驅(qū)動(dòng)的同步控制問題
- 采用PLC 解決車輛分散驅(qū)動(dòng)
- 采用PLC與變頻器控制方法, 實(shí)現(xiàn)電機(jī)同步
1 前言
當(dāng)車輛驅(qū)動(dòng)電機(jī)采用分散驅(qū)動(dòng)時(shí), 受電機(jī)轉(zhuǎn)速不同步的影響, 可導(dǎo)致車體運(yùn)行不協(xié)調(diào), 進(jìn)而使電機(jī)轉(zhuǎn)速偏離正常值, 嚴(yán)重時(shí)會(huì)造成設(shè)備損壞。因此,解決車輛驅(qū)動(dòng)電機(jī)在分散驅(qū)動(dòng)時(shí)產(chǎn)生的電機(jī)轉(zhuǎn)速不同步問題具有現(xiàn)實(shí)意義。
本文介紹一種利用PLC 解決車輛分散驅(qū)動(dòng)時(shí)電機(jī)速度同步的先進(jìn)實(shí)用的控制方法。
2 問題的提出
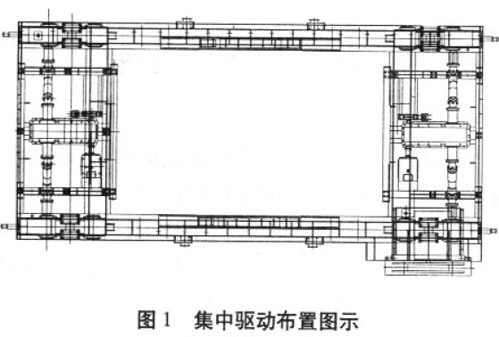
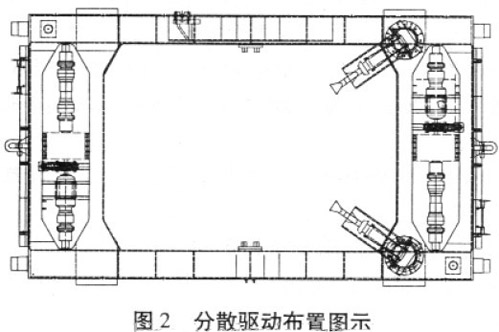
目前, 車輛的運(yùn)行設(shè)備一般采用集中驅(qū)動(dòng)( 見圖1) 和分散驅(qū)動(dòng)( 見圖2) 兩種方式。集中驅(qū)動(dòng)變頻器與電機(jī)的關(guān)系是“一拖多”; 分散驅(qū)動(dòng)時(shí)兩者的關(guān)系是“一拖一”。
[page]
3 解決方法
采用PLC 與變頻器控制方法, 實(shí)現(xiàn)多個(gè)分散驅(qū)動(dòng)電機(jī)同步運(yùn)行。PLC 采用西門子S7400 系列, 圖3為網(wǎng)絡(luò)拓?fù)鋱D。
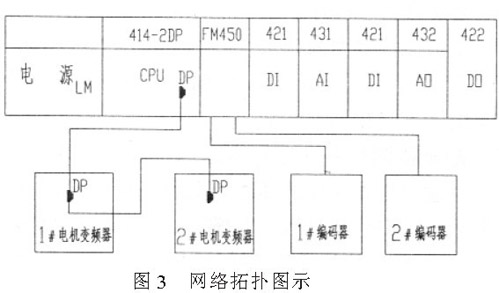
取自編碼器采集的脈沖信號, 經(jīng)高速計(jì)數(shù)模塊FM350- 1 進(jìn)入PLC, 轉(zhuǎn)換成電機(jī)速度數(shù)據(jù)。將兩個(gè)電機(jī)編碼器的信號相比較, 通過PID 調(diào)節(jié)模塊, 調(diào)整電機(jī)轉(zhuǎn)速差值, 給定電機(jī)2 的轉(zhuǎn)速值MW1000。
MW1000 需要轉(zhuǎn)化成變頻器能接受的信號。由于PLC的對應(yīng)4~20mA 值為0~27648, 變頻器接收范圍值為0~8192, 所以MW1000/27648×8192 送到模擬量輸出通道, 換算成變頻器能接受的電流信號, 以控制牽引電機(jī)2 的變頻器, PID 算法是工業(yè)控制中最常用的一種數(shù)學(xué)算法, 其基本算式如下:
Pou (t t) =Kp×(et) +Ki×Σ(et) +Kd×[ (et) - (et- 1) ]
式中:Kp—比例調(diào)節(jié)系數(shù)。是按比例反映系統(tǒng)的偏差,系統(tǒng)一旦出現(xiàn)偏差, 比例調(diào)節(jié)立即產(chǎn)生調(diào)節(jié)作用, 以減少誤差。
Ki —積分調(diào)節(jié)系數(shù)。使系統(tǒng)消除穩(wěn)態(tài)誤差, 提高無差度。積分作用的強(qiáng)弱取決于積分時(shí)間,常數(shù)Ti 越小, 積分作用就越強(qiáng)。Kd—微分調(diào)節(jié)系數(shù)。微分作用反映系統(tǒng)偏差信號的變化率, 具有預(yù)見性, 能預(yù)見偏差變化的趨勢, 因此能產(chǎn)生超前的控制作用, 在偏差還沒有形成之前, 已被微分調(diào)節(jié)作用消除。為了減少電源系統(tǒng)波動(dòng)等因素引起的外來干擾,在編制控制算法時(shí), 必須考慮利用積分環(huán)節(jié), 即采用一段時(shí)間內(nèi)連續(xù)穩(wěn)定的輸入信號而不是某一瞬時(shí)值的輸入信號進(jìn)行PID 運(yùn)算, 以消除累積誤差, 使轉(zhuǎn)數(shù)在一定的范圍內(nèi)可調(diào)。這樣, 牽引電機(jī)1 和牽引電機(jī)2 就能很好地進(jìn)行同步控制且同步精度較高, 從而確保了運(yùn)行機(jī)構(gòu)的穩(wěn)定性。
4 控制結(jié)果
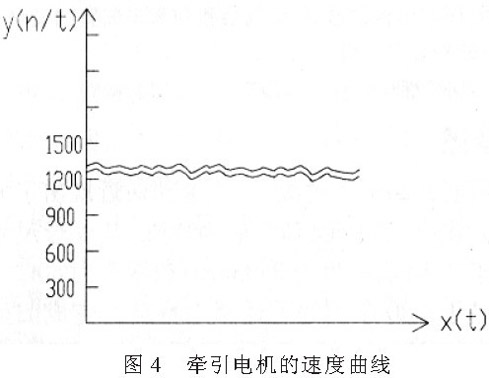
利用 STEP7 編制PLC 上位機(jī)監(jiān)控程序,Wincc采集速度值并繪制曲線。數(shù)據(jù)提取的時(shí)間間隔為15ms。實(shí)際上牽引電機(jī)1 和牽引電機(jī)2 速度是相同的, 但為了反映牽引電機(jī)2 的跟蹤和波動(dòng)情況, 在此特地將其分開, 上面是牽引電機(jī)1 的速度曲線, 下面是牽引電機(jī)2 的速度曲線(見圖4) 。牽引電機(jī)1 的速度發(fā)生變化時(shí), 牽引電機(jī)2 就能及時(shí)地響應(yīng), 進(jìn)行跟蹤, 并且能很快地達(dá)到穩(wěn)定。實(shí)驗(yàn)表明, 采用PLC 和變頻器的控制方法, 能達(dá)到較高的同步要求, 響應(yīng)快、速度波動(dòng)幅度較小。
該控制方法已在各種爐下車輛中應(yīng)用。實(shí)際應(yīng)用中, 走行同步起動(dòng)效果明顯, 車輛運(yùn)行平穩(wěn)。實(shí)踐證明, 采用PLC 解決車輛分散驅(qū)動(dòng)時(shí)電機(jī)速度同步的控制方法應(yīng)用效果較好, 是一種理想的調(diào)速控制方法, 滿足了生產(chǎn)工藝要求, 減少了設(shè)備的維修維護(hù)費(fèi)用, 保證了車輛發(fā)揮正常的生產(chǎn)效率, 經(jīng)濟(jì)效益顯著。隨著PLC 與變頻器控制方法的廣泛應(yīng)用, 必將更好地提高傳動(dòng)系統(tǒng)對速度控制的可靠性與靈活性。

