
【導(dǎo)讀】某系統(tǒng)中使用了三路串行接口的傳感器(GPS、壓力和風(fēng)向)及三路模擬電流(4~20mA)接口的傳感器(濕度、溫度和水位)。現(xiàn)需要將這些數(shù)據(jù)匯總后通過串口上傳給PC機(jī),并且要求每路信號數(shù)據(jù)都能夠?qū)崟r(shí)獨(dú)立的接收。
1. 問題的提出
某系統(tǒng)中使用了三路串行接口的傳感器(GPS、壓力和風(fēng)向)及三路模擬電流(4~20mA)接口的傳感器(濕度、溫度和水位)。現(xiàn)需要將這些數(shù)據(jù)匯總后通過串口上傳給PC機(jī),并且要求每路信號數(shù)據(jù)都能夠?qū)崟r(shí)獨(dú)立的接收。
2.系統(tǒng)設(shè)計(jì)
經(jīng)過分析,我們分別使用一塊2051單片機(jī)接收各路串口傳感器的數(shù)據(jù),同時(shí)使用一塊多路高精度ADC對轉(zhuǎn)換成電壓的溫度等信號采樣,系統(tǒng)結(jié)構(gòu)圖如圖1所示。主從機(jī)之間的具體管腳連接參見圖2。
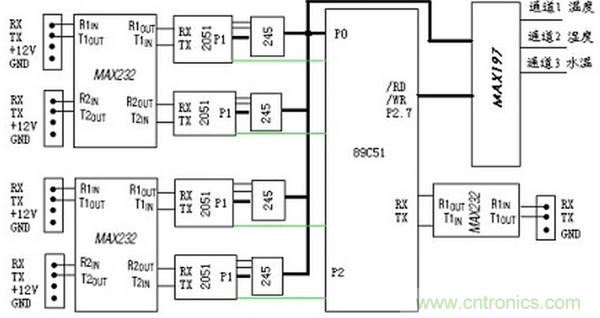
圖1.系統(tǒng)結(jié)構(gòu)框圖
系統(tǒng)中51單片機(jī)作為主機(jī)控制著整個(gè)系統(tǒng)的動(dòng)作并發(fā)起每次通信,每塊2051作為實(shí)時(shí)從傳感器獲取數(shù)據(jù)并在主機(jī)控制下完成通信。主機(jī)和各從機(jī)之間通過并口連接通信。主從機(jī)工作流程如下:
· 主機(jī)上電初始化后,通過P0口發(fā)送從機(jī)地址選中一路從機(jī)并等待應(yīng)答。
· 各從機(jī)上電初始化后接收傳感器串行數(shù)據(jù),然后通過P1口接收主機(jī)地址,當(dāng)?shù)刂放c自己相符后,調(diào)整245方向并由245向主機(jī)發(fā)送傳感器數(shù)據(jù),此過程由握手線負(fù)責(zé)控制。
· 從機(jī)發(fā)送完所有數(shù)據(jù)后再次將245方向改為接收,重新開始接收傳感器數(shù)據(jù)和主機(jī)發(fā)送的地址。
· 主機(jī)按照同樣方式接收所有各路2051數(shù)據(jù)。
· 串口數(shù)據(jù)接收完畢后,主機(jī)控制AD轉(zhuǎn)換并獲取三路信號數(shù)據(jù)。
· 主機(jī)將所有數(shù)據(jù)集合成規(guī)定格式后通過232發(fā)送給PC機(jī)。
主從機(jī)的工作流程圖如圖3所示:
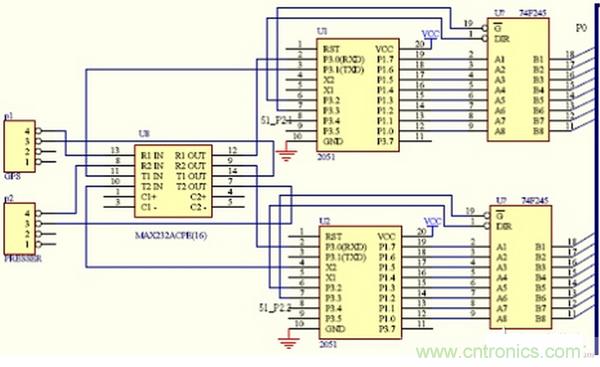
圖2.主從機(jī)間的管腳連接
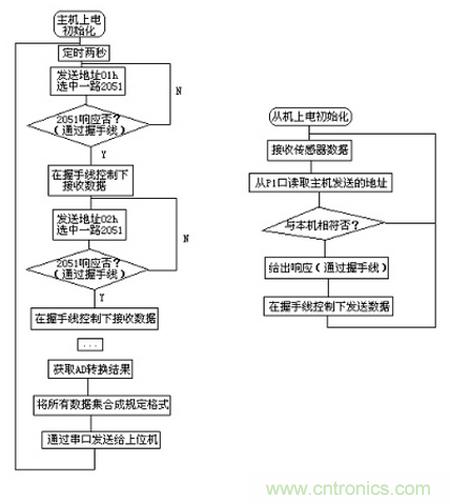
圖3.主從機(jī)工作流程圖
主要程序代碼分別如下,主機(jī)為:
……
sbit adc_busy=P3^2;
sbit adc_hben=P3^3;
sbit hand1=P2^0;//GPS
sbit hand2=P2^1;//PRESSURE
sbit hand3=P2^2;//WIND
sbit hand4=P2^3;//BAK1
uchar idata gps[96];
uchar idata pressure[9];
uchar idata wind[26];
uchar idata tem[6];
uchar idata hum[6];
uchar idata water_tem[7];
……
P1=0x01;
for(i=0;i《96;i++){
while(hand1!=0);
gps[i]=P1;
while(hand1==0);
}
sendbyte2pc(’#’);
sendbyte2pc(’#’);
sendbyte2pc(’1’);
sendbyte2pc(’ ’);
sendbyte2pc(’ ’);
send2pc(gps,96);
……
從機(jī)為:
……
sbit dir=P3^2;
sbit en=P3^3;
sbit hand=P3^4;
……
loop:
RI=0;i=0;
while(!RI);//wait for receiving ready
if (SBUF!=0x40)//data head
goto loop;
data_str[i]=0x40;i++;
RI=0;
while(!RI);//wait for receiving ready
if (SBUF!=0x40)//data head
goto loop;
data_str[i]=0x40;i++;
do{
RI=0;
while(!RI);
data_str[i]=SBUF;
i++;
}
while(i!=96);
dir=0;en=0;//enable data receiving P1=0xff;
for(i=0;i《100;i++){
if(P1==0x01)
goto send;
}
en=1;
goto loop;
send:
for(i=0;i《96;i++){
dir=1;
P1=data_str[i];
hand=0;
for(j=0;j《5;j++){;}
hand=1;
}
en=1;dir=0;
goto loop;
……
3.結(jié)語
本文中提出的并行通信方法具有電路結(jié)構(gòu)簡單清晰、程序容易實(shí)現(xiàn)等特點(diǎn),已經(jīng)在實(shí)際中證明可行。在調(diào)試過程中可以借用串口助手等軟件接收數(shù)據(jù)來驗(yàn)證通信的可靠性。


