
1 引言
得益于被稱為“深度學習”的新一代人工智能軟件和更加可靠性能更好的電腦和硬件傳感器,在未來幾十年里,汽車將獲得與人類相似的能力,在無法預測的環境中自主安全駕駛,無人駕駛汽車將逐漸取代由人類駕駛的普通汽車[1];在這個從普通汽車到無人駕駛汽車過渡的過程中,毫米波防撞雷達作為無人駕駛汽車的“眼睛”,收集汽車周邊物體的速度,距離,位置等信息;毫米波防撞雷達的研究也成了近年來汽車電子廠商們關注的熱點。
2 汽車防撞雷達介紹
應用于汽車的防撞雷達一般工作在兩個頻段:24GHz-24.25GHz和76GHz-81GHz;工作在24GHz頻段的防撞雷達一般安裝在汽車后向,實現盲區監測(BSD),變道輔助(LCA)以及倒車側向警告(RCTA)等功能;工作在76GHz-81GHz頻段的毫米波防撞雷達一般安裝在汽車前向,用于實現自適應巡航(ACC),緊急制動(AEB)等功能。汽車防撞雷達不同功能覆蓋區域如圖1所示:

圖1 防撞雷達波束覆蓋區域示意圖
本文所介紹的波束賦形陣列天線工作在77GHz-79GHz,作為安裝在汽車后向毫米波防撞雷達的一部分,用于實現BSD,LCA和RCTA功能;相對實現同樣功能工作在24GHz的防撞雷達,工作在77GHz頻率的雷達具有更高的速度探測精度,更遠的探測距離,更好的目標探測分辨率以及更小的尺寸,更易集成在后保險杠或汽車尾燈中等優勢。
3波束賦形陣列天線的設計
3.1串饋微帶貼片陣列天線
微帶天線具有低剖面,重量輕,便于加工,成本低廉,易于與微波電路集成等優點;將微帶貼片天線串聯饋電組成駐波線陣,能夠滿足高增益低副瓣等要求,適合用作毫米波防撞雷達天線。
3.1.1理論分析
微帶貼片天線可看做一個場量在橫向沒有變化的開路諧振器[2],其輻射場由貼片長度方向兩側開路縫隙產生,如圖2所示
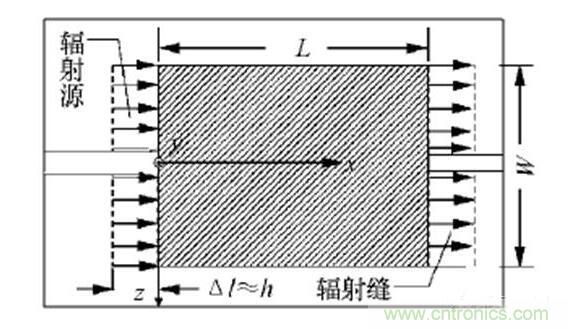
圖2 矩形微帶貼片天線
通過微帶傳輸線將貼片串聯組成串饋駐波陣,貼片間距為;其示意圖如圖3所示
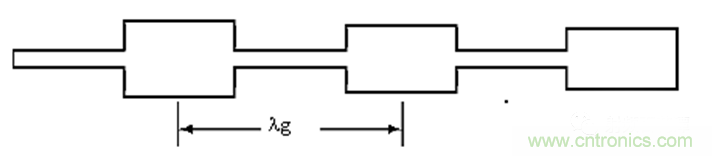
圖3 串饋微帶貼片線陣結構示意圖
在串饋微帶貼片陣列中,每個貼片天線的寬度正比于貼片天線等效導納,而等效導納又正比于該貼片的激勵功率;因此通過并調節線陣中每個貼片的寬度,可以改變該天線的激勵功率,從而實現線陣激勵的錐削分布,滿足防撞雷達天線在俯仰面對于低副瓣的要求。
3.1.2 仿真設計
根據增益與波束寬度的要求確定該串饋微帶貼片線陣單元數為10,副瓣電平小于-20dB;采用厚度為5mil的RO3003介質基板,經理論分析與仿真軟件優化。仿真模型如圖4所示

圖4天線仿真模型
天線俯仰面增益方向圖如圖5所示
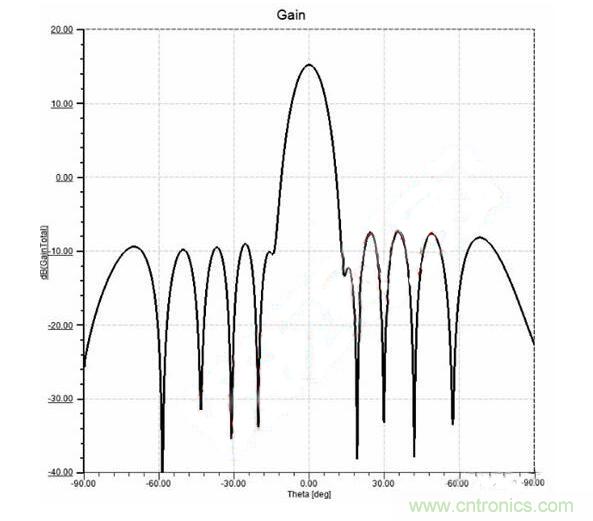
圖5 俯仰面增益方向圖
線陣增益為15.1dBi,副瓣電平-22.6dB。
將圖4的線陣模型等間距排列6行組成如圖6所示的面陣
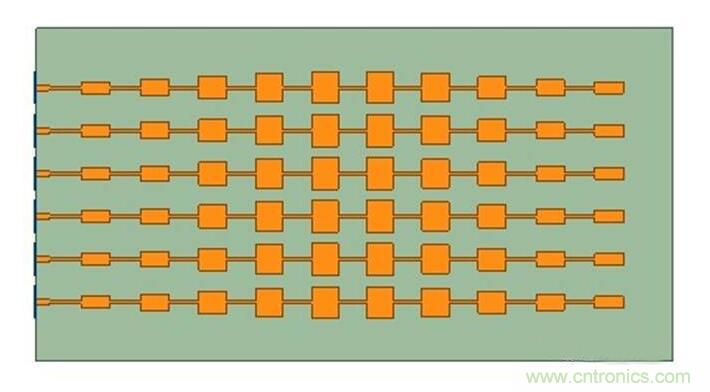
圖6 面陣仿真模型
該面陣用于實現水平面方向圖的波束賦形。
3.2 PSO粒子群算法優化激勵幅度相位
粒子群的基本概念是來自于鳥群覓食行為的研究[3]。與遺傳算法類似,粒子群算法也是一種隨機搜索方法,不同的是,粒子群優化算法沒有選擇、交叉、變異等復雜過程,而是依靠個體間的協作來尋取最優解。每個粒子通過跟蹤粒子本身找到的最優解Pbest和群體找到的最優解Gbest,更新離子的位置和速度,不斷向最優解靠近,最終達到最優解。粒子群算法優化流程圖如圖7所示
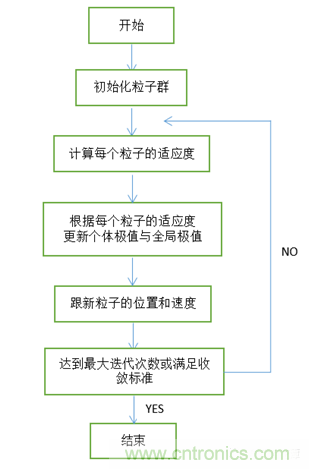
圖7 算法優化流程圖
從防撞雷達威力圖提取出波束賦形的目標方向圖,通過PSO優化算法對圖6中陣列天線激勵幅相值得優化,實現對目標方向圖的賦形。在HFSS仿真軟件中輸入粒子群算法優化得到的激勵幅相值,得到仿真方向圖與目標方向圖如圖8所示
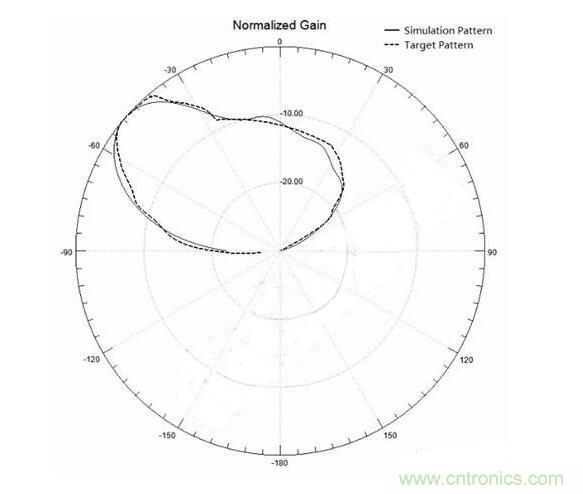
圖8波束賦形方向圖
從圖8可見仿真結果與目標方向圖吻合較好,說明粒子群算法優化出的結果可靠。
3.3功分網絡的設計
3.2節確定了各線陣激勵的幅相值,但圖8里的仿真方向圖是理想的,現實中需要通過1分6的功分網絡來將其實現。常用的功分器有Wilkinson功分器和T型節功分器;Wilkinson功分器只能組成并饋網絡,這種網絡具有較大的損耗且占用面積大,不利于小型化;而由T型節組成的串饋功分網絡具有損耗低占用面積小的優勢,更適合于實現3.2節中波束賦形的幅相激勵。
3.3.1理論分析
該串饋網絡依靠阻抗變換段實現波束賦形的激勵幅度,通過改變輸出饋線的長度實現波束賦形的激勵相位;串饋網絡等效電路如圖9所示
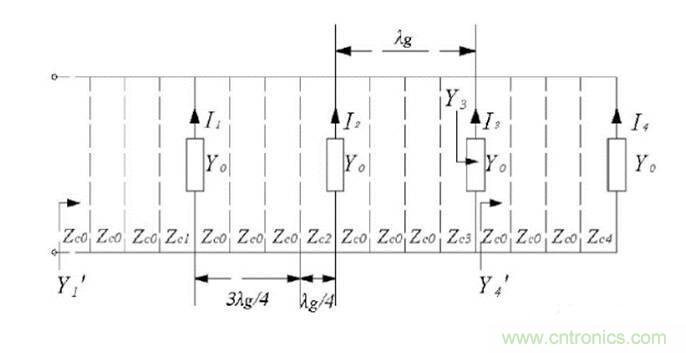
圖9串饋網絡等效電路
圖中Yo為連接功分網絡的串饋線陣等效導納,Zci為各阻抗變換段的特性阻抗,Zco為饋線的特性阻抗;串饋網絡輸出端口激勵電流與阻抗有如下的關系[4]
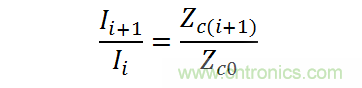
各端口激勵電流Ii由3.2節優化得到,傳輸線特性阻抗Zco已知,可以求出每節阻抗變換段對應的特性阻抗,從而可以得到該特性阻抗對應的寬度微帶線寬。
3.3.2 仿真設計
功分網絡仿真模型如圖10所示,

圖10功分網絡仿真模型
仿真得到的激勵幅相數據如表1所示

表1 仿真與PSO優化幅相數據
從表1中可以看出,該功分網絡較好的實現了PSO優化出的激勵幅相值。
3.4整體仿真結果
圖10功分網絡與圖6中面陣連接成如圖11的仿真模型
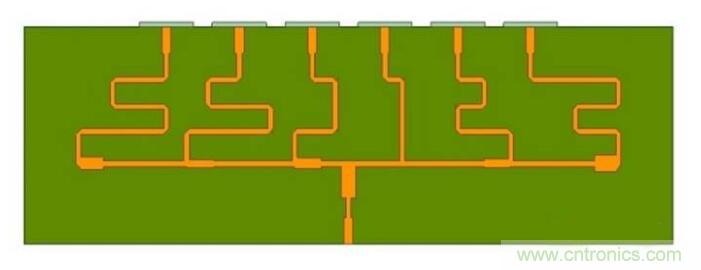
圖11整體仿真模型
仿真得到的方位面方向圖與目標方向圖對比如圖12所示
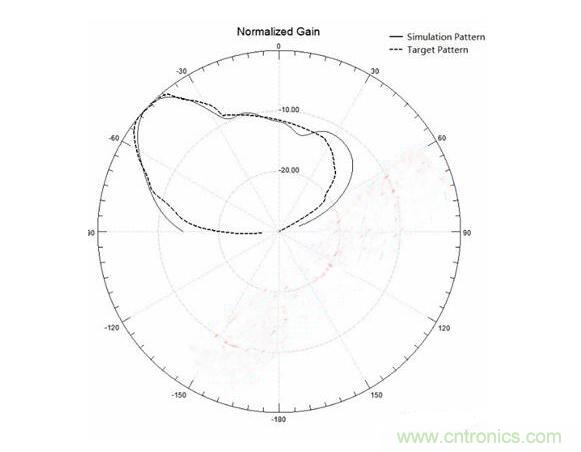
圖12仿真與目標方向圖對比
從圖12可見仿真方向圖在-60°~+36°范圍內與目標方向圖吻合較好,在此范圍之外與目標方向圖略有差異;這是由于天線對網絡耦合影響了網絡實際輸出的幅度和相位,仿真方向圖在遠離主波束的角度與目標方向圖有些差異;該仿真方向圖總體可以滿足后向防撞雷達BSD,LCA,RCTA三種功能應用。
4 結論
本文設計了一種工作在77GHz-79GHz頻段,用于汽車后向防撞雷達的波束賦形陣列天線;首先根據雷達對于俯仰面方向圖高增益低副瓣的需求,設計了串饋貼片線陣,實現了-22.6dB的副瓣電平;然后將6條線陣等間距排布組成面陣,通過PSO粒子群優化算法優化出可以實現方位面賦形波束的激勵幅相值;接著設計了1分6的串饋功分網絡實現了優化算法得到的激勵幅相,最后將網絡與天線面陣連接完成波束賦形陣列天線的設計。該波束賦形陣列仿真方向圖與目標方向圖吻合較好,對應用于77GHz汽車防撞雷達的賦形天線設計具有一定的參考價值。
推薦閱讀:
想了解無線傳能充電器是如何工作的嗎?
超聲波感應器會被用于何處?——第一部分
溫習一下大學的傳感器知識,做開發這些器件必須精通
為什么要將超聲波傳感器用于無人機設計?


