
- 一種硬件細分方法的研究與應用
- 采取純硬件進行細分的方法
- 實現高倍頻細分
1 引 言
目前,各類伺服驅動器及其應用中廣泛采用光柵裝置作為速度測量、位置測量的敏感元件。而且,廣泛采用兩路正交方波的形式,系統的實時性要求極高。因此,對于光柵編碼器的信號的細分等主要處理環節,一方面集中考慮提高分辨率的問題,同時,需要考慮實時性的問題。
盡管高速單片機、DSP等高速數字處理器件的應用可以極大地改善系統的實時性,但是做除法運算仍需較長的時間,大約為幾百微秒,無法滿足系統實時性的要求,因此,軟件細分的方法受到了限制。
目前,有很多采取純硬件進行細分的方法,如,電阻鏈細分,空間細分,鎖相倍頻,還有兩種方法的結合使用等。上述幾種方法在實際應用中被廣泛采用,特別是電阻鏈細分,在低倍頻的情況下是一種很好的方案。但是在高倍頻的情況下,不可避免地出現大量使用比較器的情況,以及比較器死區(滯后區)問題,難以調節。空間細分的方法中,主要解決的問題是切割電平精準的問題,其中的三角波切割三角波的方案有很多優點,可以改變使用過零比較造成的細分誤差。但是仍然存在大量使用比較器的問題,調節起來比較繁瑣。鎖相倍頻細分的方法,一方面,成本較前兩種高,另一方面,受環境溫度的影響比較大,實際的應用中很少采用。本文從原理上考慮了一種新的細分方案,使用取絕對值,八卦限理論,利用ASIC器件(速度為納秒級)對信號進行邏輯運算和處理等一整套純粹硬件的信號細分方案,并通過調試和實際應用,驗證了該方案的可行性。
2 細分原理及框圖
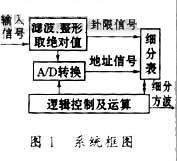
細分主要由以下幾個部分構成,取絕對值、提取卦限信號、A/D轉換、查細分表、邏輯運算等。系統框圖如圖1所示。
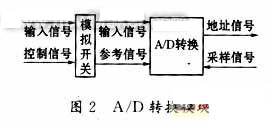
A/D轉換模塊對絕對值信號進行采樣轉化,如圖2所示:模擬多路開關在卦限控制信號的作用下,對絕對值信號進行選擇,其輸出分別作為A/D轉換的輸入信號和參考信號。A/D轉換受控于采樣控制信號,其輸出數據與采樣時刻的相位信號對應。
[page]
3 硬件設計與調試
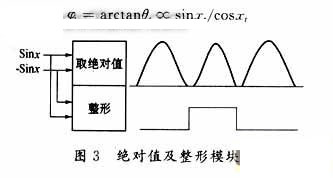
從原理上可以看出,該細分模塊的技術關鍵是比較器整形產生的卦限信號和A/D模塊產生的地址信號必須同步,這是能否正確細分的關鍵。因此,在電路設計過程中,比較器的滯后及其抗干擾能力是必須考慮和解決的問題。在抗干擾方面,采用差分放大,可以有效地抑制共模干擾。考慮其滯后問題,采用整形電路與取絕對值電路分離,可以通過調節各個運放的直流參數,使得卦限信號與絕對值信號能夠近似同步,否則,產生的細分方波將會在過零處變得混亂。如圖3所示,對其中sinx信號取絕對值及整形,這樣一來,既方便了調試,也避免了干擾及比較器的滯后問題。
4 檢測及檢測結果
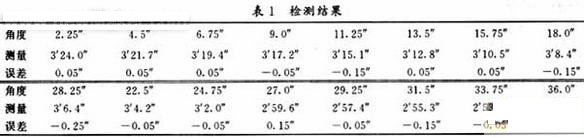
采用純硬件的手段可以滿足系統實時性的要求,采樣速度為2μs。同時,采用該方法可以實現高倍頻細分,滿足大多數系統對于兩路正交反饋方波的需求,可以在光柵編碼器信號處理中采用。


