
【導(dǎo)讀】此文來自于同濟(jì)大學(xué)汽車學(xué)院白杰教授在2017上海智能網(wǎng)聯(lián)新能源汽車高峰論壇上的分享,詳細(xì)闡述了車載毫米波雷達(dá)對當(dāng)前智能駕駛的意義,以及對未來雷達(dá)技術(shù)的發(fā)展方向的探討。

智能駕駛的背景與進(jìn)程
現(xiàn)在對自動(dòng)駕駛、智能駕駛、智能網(wǎng)聯(lián),有很多各種各樣的定義。在這些定義里面,ADAS 系統(tǒng)是我們通常說的智能駕駛員輔助系統(tǒng),「ADAS 系統(tǒng)」一般來說在 Level 0 到 Level 1,具備單一的控制功能。當(dāng)復(fù)數(shù)的ADAS系統(tǒng)搭載在一輛車?yán)锩嬷螅覀儼阉x為「準(zhǔn)自動(dòng)駕駛」,或者說已經(jīng)接近自動(dòng)駕駛。如圖1所示,準(zhǔn)自動(dòng)駕駛里面,包括「駕駛員負(fù)全責(zé)」以及「駕駛員與系統(tǒng)」的切換,這個(gè)部分都屬于準(zhǔn)自動(dòng)駕駛的領(lǐng)域。

圖1自動(dòng)駕駛的內(nèi)容與定義
「完全自動(dòng)駕駛」就是說汽車由整個(gè)自動(dòng)駕駛系統(tǒng)負(fù)責(zé)任,包括加速、轉(zhuǎn)向、制動(dòng)都由汽車來操縱。這是自動(dòng)駕駛大致的內(nèi)容和定義。圖1中沒有提完全無人駕駛,就是說整個(gè)車完全無人的話,應(yīng)該在這上面還有一層,估計(jì)到那個(gè)時(shí)候,汽車工業(yè)可能是另外一種形態(tài),就是說汽車工業(yè)可能來到后汽車工業(yè)時(shí)代,所以沒有把這一部分表達(dá)出來。
大家可以看到,自動(dòng)駕駛進(jìn)入市場的時(shí)間上大致在2020年或者2025年,可能這是限于一些高檔車型以試驗(yàn)性質(zhì)來運(yùn)行的時(shí)間。就是說,實(shí)際到我們一般人買的車?yán)锩娉霈F(xiàn)自動(dòng)駕駛的話,估計(jì)還要更長的時(shí)間。

圖2自動(dòng)駕駛的實(shí)現(xiàn)途徑
在自動(dòng)駕駛里面,我們實(shí)現(xiàn)自動(dòng)駕駛,主要是這么兩種途徑:一個(gè)是基于車載自身傳感器的「自主行走控制系統(tǒng)」;還有一個(gè)基于V2X獲取前方信息的「協(xié)調(diào)型行走系統(tǒng)」,也就是所謂的汽車網(wǎng)聯(lián)。再往上一層就是智能加上網(wǎng)聯(lián),當(dāng)智能和網(wǎng)聯(lián)這兩個(gè)系統(tǒng)聯(lián)合在一起,可能就是將來的自動(dòng)駕駛系統(tǒng)。
2020年或者2025年,這個(gè)時(shí)間上都是相對來說比較含糊的。為什么?因?yàn)榫W(wǎng)聯(lián)這條路,用什么樣的方式,包括什么樣的標(biāo)準(zhǔn),到目前來說還具有很多模糊性,在技術(shù)上還沒有完全準(zhǔn)確的時(shí)間。所以,要將智能和網(wǎng)聯(lián)這兩條線合并到一條線的時(shí)間上,就不是那么準(zhǔn)確了。

圖3自動(dòng)駕駛的商業(yè)路線
現(xiàn)在在自動(dòng)駕駛技術(shù)的商業(yè)化路線方面,我們前面有的初級(jí)自動(dòng)駕駛,也可以說是ADAS系統(tǒng),在主機(jī)廠里面,現(xiàn)在主機(jī)廠里面一般采用SAE 1級(jí)、2 級(jí),然后往3級(jí)、4級(jí)方向發(fā)展。0級(jí)在很早以前,90年代就有了。
然后在中級(jí)里面,像現(xiàn)在的特斯拉直接從2級(jí)開始。當(dāng)然特斯拉從SAE 2級(jí)、3級(jí)開始也有它的產(chǎn)業(yè)基礎(chǔ),在美國那邊汽車公司里面都已經(jīng)進(jìn)入了2級(jí),它再從0級(jí)出發(fā)也是不符合時(shí)代的。所以它的表現(xiàn)也是屬于比較正常的,當(dāng)然特斯拉更多的是從2級(jí)自動(dòng)化用了3級(jí)的 HMI(人機(jī)界面)系統(tǒng),這樣有一種跨界的感覺。
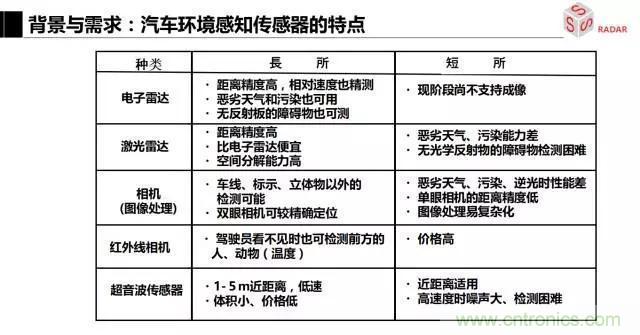
圖4汽車環(huán)境感知傳感器的特點(diǎn)
自動(dòng)駕駛里面,智能的這部分更多是車載傳感器的集合、傳感器的融合以及應(yīng)用。在傳感器里面(如圖4所示),車載傳感器主要是分五種:電子雷達(dá)、激光雷達(dá)、相機(jī)、紅外線相機(jī)、超聲波傳感器。其中,超聲波由于探測距離太近,雖然現(xiàn)在搭載率很高,但是將來可能會(huì)更多的被取代。
在激光雷達(dá)方面,現(xiàn)在多線的激光雷達(dá)價(jià)格還相對比較高,而且這個(gè)價(jià)格什么時(shí)候降下來并不一定,我們很多人都想激光雷達(dá)在未來幾年內(nèi)價(jià)格能降下來,但是這個(gè)可能很難做到。當(dāng)年毫米波雷達(dá)也是從90年代開始一直降價(jià)降到現(xiàn)在,終于從數(shù)萬美金降到―百美金。所以說,這個(gè)時(shí)間的發(fā)展往往不一定如我們所期待的那么順利。

圖5現(xiàn)代車載雷達(dá)構(gòu)成
在汽車電子雷達(dá)方面,現(xiàn)在汽車搭載的主要是往前看的前視雷達(dá),有24G和77G兩種遠(yuǎn)距離雷達(dá)。這個(gè)24G的里面,也有往后視的24G的雷達(dá)。24G和77G的雷達(dá)的區(qū)別點(diǎn)在于,24G分窄帶和寬帶兩種雷達(dá),77G 主要是窄帶雷達(dá),它的帶寬比較窄。
77G、76G,雖然法規(guī)上允許最大1個(gè)GHz,但是77G雷達(dá)的帶寬大概在500MHz 以內(nèi),帶寬不夠高的話,會(huì)帶來距離分解能力不高的問題。24G 的寬帶雷達(dá)當(dāng)時(shí)在法規(guī)上最大可以到 2個(gè)GHz,也有說當(dāng)時(shí) 26G可以用 4個(gè)GHz。這里帶寬的提高使得分解能力提高很多。但是由于只有2G帶寬的信息分辨能力、運(yùn)算速度的限制和EU區(qū)域限制,帶寬帶來的效果并沒有表現(xiàn)出來。
智能駕駛毫米波雷達(dá)
稍微介紹一下汽車?yán)走_(dá)的歷史,其實(shí)最早從70年代、80年代,大家就一直在做汽車車載毫米波雷達(dá)。汽車的智能化也不是最近才提起的話題,實(shí)際上在70年代的時(shí)候大家就想做汽車的智能化。
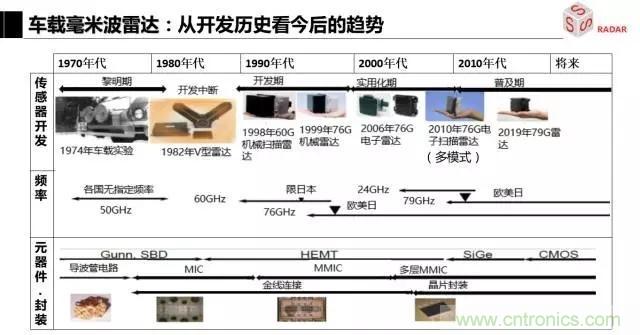
圖6車載毫米波雷達(dá)的發(fā)展史
在圖6中可以看到,70年代的時(shí)候汽車上面背著幾個(gè)大臉盆似的天線,這個(gè)時(shí)候就開始想著做汽車智能化。1990年開始,進(jìn)入90年代微電子技術(shù)的發(fā)展,一下子使得雷達(dá)小型成為可能,也是在這個(gè)時(shí)候雷達(dá)開始開發(fā)得快一點(diǎn)。
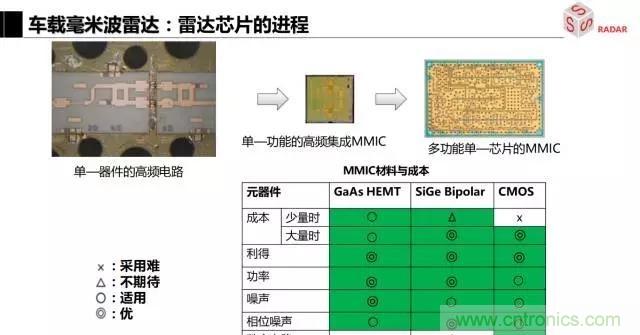
圖7雷達(dá)芯片的進(jìn)程
車載雷達(dá)里面有一個(gè)芯片材料,這個(gè)芯片從90年代開始,最早是用GaAs這種材料,現(xiàn)在是SiGe,在將來五到十年可能CMOS芯片會(huì)出來。用CMOS做的高頻信號(hào)發(fā)生器,當(dāng)材料變得越來越便宜的同時(shí),它的功率、噪聲、功放這方面的表現(xiàn)會(huì)越來越難控制,它對生產(chǎn)工藝的相對要求就會(huì)越來越高。
現(xiàn)在國外也在往CMOS這個(gè)方向轉(zhuǎn),但是剛剛起步階段,相對來說制造工藝技術(shù)方面要求更高。我們要注意一點(diǎn),當(dāng)一種新的材料、新的技術(shù)導(dǎo)入的時(shí)候,在起步的前幾年,它的價(jià)格肯定會(huì)比它的上一代暫時(shí)貴,例如CMOS芯片比SiGe芯片貴,但這是起步階段必然的問題。
79GHz雷達(dá)技術(shù)
我們的下一代雷達(dá)會(huì)是什么?
我們反轉(zhuǎn)來看過去歷史的發(fā)展就會(huì)看到,現(xiàn)在我們使用的技術(shù),其實(shí)就是十年前各個(gè)研究所、大學(xué)在開發(fā)的技術(shù)。也就是說,在將來下一個(gè)五年、十年,我們會(huì)用的技術(shù)基本上目標(biāo)是定在79G毫米波雷達(dá)。國外5到10年前就已經(jīng)開始做79G。
為什么會(huì)用79G?
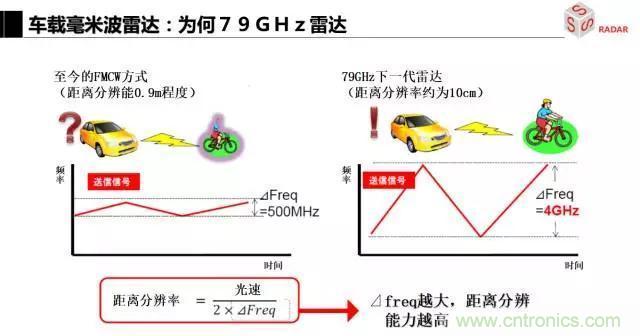
圖8為何會(huì)是79GHz雷達(dá)?
如圖8所示,我們現(xiàn)階段用的77G的毫米波雷達(dá),根據(jù)雷達(dá)的公式,帶寬較窄的情況下,它的距離分辨率大概也就是1米的范圍。
當(dāng)帶寬提高的話,我們可以看到在79G用了4個(gè)GHz,它的距離分辨率可以提高到很多。當(dāng)距離分辨率提高到了10個(gè)厘米,兩個(gè)物體前后左右相隔的距離差達(dá)到10個(gè)厘米也能測量出來的話,就不需要角度的分解了,也就是說不需要相控陣天線就可以把兩個(gè)物體分開。這能夠極大地提高道路上各種障礙物的分離檢測能力,而不需要帶上一個(gè)強(qiáng)大的相控陣天線。

圖9自動(dòng)駕駛用下一代車載雷達(dá)構(gòu)成
在今后,由于79G雷達(dá)的出現(xiàn),將來的智能駕駛的汽車就會(huì)前向還是24G、77G的遠(yuǎn)距離雷達(dá),但在中間側(cè)向有 4個(gè)79 的毫米波雷達(dá),來實(shí)現(xiàn)環(huán)視。
79G的毫米波雷達(dá)具有高分解能力,使得在某些功能可以逐漸代替一些現(xiàn)有的光學(xué)傳感器的性能。也就是說79G除了水平方向的高分解能力之外,同時(shí)可以做一個(gè)上下方向的79G毫米波雷達(dá),水平和上下同時(shí)進(jìn)行掃描,很容易實(shí)現(xiàn)毫米波的成像。
也就是說,很快(大概十年內(nèi))將會(huì)有一種很強(qiáng)大的毫米波成像雷達(dá),這在很大的程度上會(huì)替代現(xiàn)有的光學(xué)傳感器。
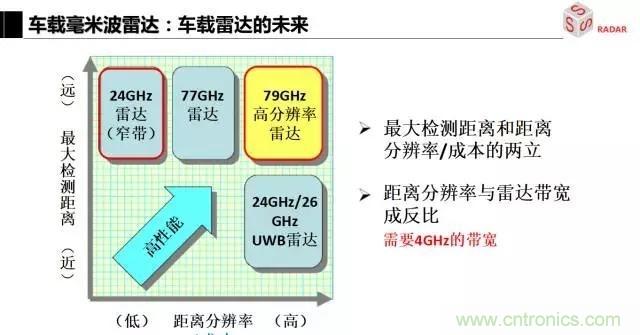
圖10車載雷達(dá)的未來
圖10是目前整個(gè)雷達(dá)在發(fā)展機(jī)制上區(qū)分出的幾種雷達(dá),這里列出來了24G、77G、79G三種。這幾種雷達(dá)里面,主要考慮兩種走向:
距離分辨率跟成本,也就是說在性價(jià)比這個(gè)方面;
最大檢測距離。
從圖 10的坐標(biāo)中可以知道,將來的趨勢有可能是從性能更好的方向上來說,會(huì)往79G走。還有一個(gè)性價(jià)比,價(jià)格最便宜的方向是24G,這在中國可能在一段時(shí)期里面都會(huì)存在。這跟歐美市場可能會(huì)有不一樣的走向。因?yàn)闅W美市場的話已經(jīng)使用77G了,而國內(nèi)的話,可能采取性能高的往79走、價(jià)格便宜的往24G走的路線。
79G的毫米波雷達(dá)會(huì)有什么好處呢?
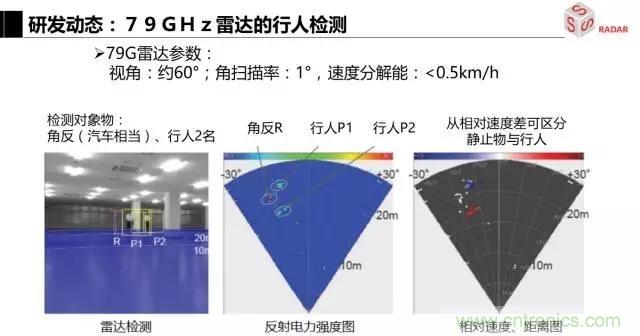
圖11研發(fā)動(dòng)態(tài):79GHz雷達(dá)的行人檢測
79G的毫米波雷達(dá)由于它可以做到4個(gè)G的帶寬,在這4個(gè)G的帶寬里面可以實(shí)現(xiàn)成像。比如說像這個(gè)室內(nèi),兩個(gè)人和反射板(用于表示汽車),把它們放在一起,79G能夠很精準(zhǔn)的將其分解出來,當(dāng)然圖11這是通過機(jī)械式掃描來看這個(gè)79G的性能會(huì)怎樣。在以前的雷達(dá)里面是看不到這些東西,與現(xiàn)在在醫(yī)院里做CT成像是基本一樣的。
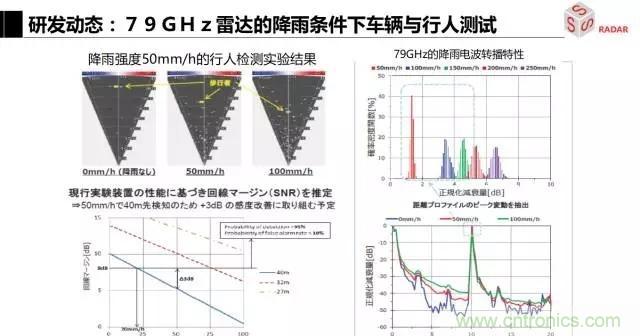
圖12研發(fā)動(dòng)態(tài):79GHz雷達(dá)降雨條件下車輛與行人測試
當(dāng)然79G也是電磁波雷達(dá),由于頻率越來越高,我們要考慮到電波在降雨或者是冰雪條件之下,傳感器的性能也必然會(huì)衰減。
比如說行人行為檢測,沒降雨的時(shí)候,這一款雷達(dá)可以看到50米的話,下中雨的時(shí)候,同款雷達(dá)看人的距離會(huì)縮短到40米。也就是說,會(huì)有10米的衰減出現(xiàn)。因此,如果79G雷達(dá)要看得更遠(yuǎn)的話,在信噪比方面的性能還需要做進(jìn)一步的增強(qiáng),還要做很多的努力。
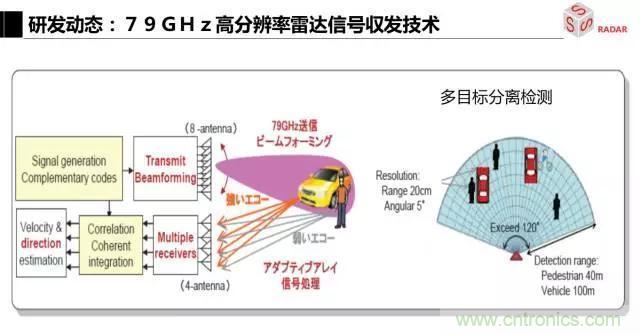
圖13研發(fā)動(dòng)態(tài):79GHz 高分辨率雷達(dá)信號(hào)雙收技術(shù)
剛才講的79G,在沒有相控陣的時(shí)候,它的分解能力就很高。而如果同時(shí)對79G雷達(dá)也做與現(xiàn)在77G 一樣的相控陣天線,多發(fā)射多接收的話,這時(shí)候?qū)Χ嗄繕?biāo)的分離檢測能力除了距離上的分解還會(huì)有角度上的分解,對多目標(biāo)的分離檢測能力將會(huì)有大幅度的提高。
當(dāng)然這個(gè)大幅度的提高的同時(shí),也會(huì)帶來一個(gè)很大的問題,就是多目標(biāo)的分離檢測。現(xiàn)在77G雷達(dá)用的是32或64個(gè)目標(biāo),在79G的時(shí)候雷達(dá)內(nèi)部信號(hào)處理就不是同時(shí)跟蹤764個(gè)目標(biāo),而是128個(gè)或者更多的目標(biāo)數(shù)。我們同時(shí)跟蹤的目標(biāo)數(shù)越多,對雷達(dá)內(nèi)部的信號(hào)處理芯片運(yùn)算能力要求會(huì)成指數(shù)增長。這是79G雷達(dá)開發(fā)需要考慮的問題。
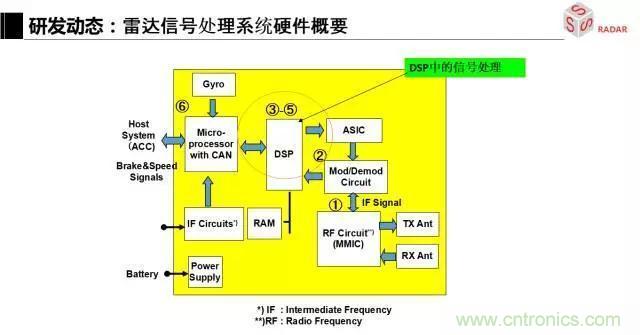
圖14研發(fā)動(dòng)態(tài):雷達(dá)信號(hào)處理系統(tǒng)硬件概要
雷達(dá)信號(hào)處理可以集成在一個(gè)DSP芯片里面。這在一個(gè)芯片里面做信號(hào)處理的話,除了剛才多目標(biāo)數(shù)量的影響之外,還有下雨天氣,道路環(huán)境噪聲的影響,在這里面除了對多目標(biāo)的分離檢測信號(hào)做分離處理,還要做進(jìn)一步的跟蹤處理。

圖15研發(fā)動(dòng)態(tài):雷達(dá)信號(hào)處理系統(tǒng)概要
還有如自動(dòng)駕駛里的車輛慣導(dǎo),通過慣導(dǎo)來推算前方障礙物對你來說具有多大的危險(xiǎn)性。這個(gè)危險(xiǎn)性的判斷,是雷達(dá)信號(hào)處理的一部分。也就是說在雷達(dá)信號(hào)處理里面,會(huì)在雷達(dá)的內(nèi)部做圖15 中所提到的六項(xiàng)信號(hào)處理。
隨著現(xiàn)在雷達(dá)波形越來越復(fù)雜,從第二個(gè)階段開始信號(hào)處理都已經(jīng)是運(yùn)算負(fù)荷很重的信號(hào)處理,包括我們現(xiàn)在用的最新的雷達(dá),這也是79G雷達(dá)需要克服的技術(shù)難題。
結(jié)論
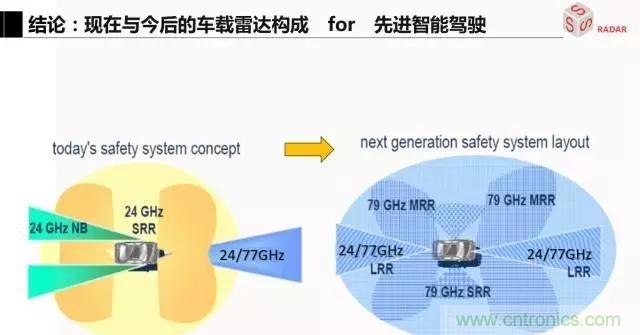
圖16現(xiàn)在與今后的車載雷達(dá)構(gòu)成對比
如圖16所示,今后我們感覺車載雷達(dá),它肯定會(huì)從這么幾個(gè)方向來發(fā)展。
下一代的感知系統(tǒng)里面,感知系統(tǒng)會(huì)往哪個(gè)方向走,取決于毫米波雷達(dá)成像技術(shù)走得有多快。只有毫米波雷達(dá)往成像方向走了以后,整個(gè)感知系統(tǒng),對于將來的自動(dòng)駕駛會(huì)起到很多引領(lǐng)作用。
當(dāng)然毫米波雷達(dá)成像,在軍用上早就已經(jīng)有,只不過是成本方面的問題。現(xiàn)在79G已經(jīng)實(shí)現(xiàn)了距離方面的掃描,即現(xiàn)在是水平方面,只要加一個(gè)垂直方向的維度,也就是最多是以兩個(gè)79G的成本來做,就可實(shí)現(xiàn)毫米波的成像。現(xiàn)在79G也就在一兩百美金的范圍,乘以二也就是四五百美金,毫米波雷達(dá)的成像在今后五年里面會(huì)成功出來。
推薦閱讀:



