
【導讀】針對交流電機的不同類型,目前已經(jīng)典型應用的控制系統(tǒng)有以下幾種:同步電機控制系統(tǒng),異步電機控制系統(tǒng),開關(guān)磁阻電機控制系統(tǒng)等。雖然不同的控制方式控制原理不同,但是系統(tǒng)的構(gòu)成和各部分的功能基本一致。
1) 電源系統(tǒng)
電源系統(tǒng)是指將輸入系統(tǒng)的動力電源轉(zhuǎn)換成用于驅(qū)動交流電機的直流或交流電源,根據(jù)實際控制方式的不同,一般可以分為“交直交”電壓源型逆變電路,“交直交”電流源型逆變電路,“交交”型變頻電路以及泵電源電路等。圖1是“交直交”電壓源型電源系統(tǒng)的典型電路,如果將并聯(lián)的濾波電容去掉,在直流側(cè)串聯(lián)一個大濾波電感則為“交直交”電流源型電路。
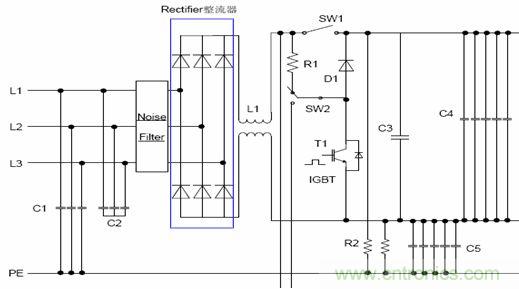
圖1
2) 微處理器板
微處理器是用來實現(xiàn)交流電機各種數(shù)字控制算法的硬件平臺。主要組成如下:
a) CPU,通常根據(jù)系統(tǒng)的復雜程度選擇通用單片機或?qū)S玫腄SP芯片
b) RAM,ROM,EPROM,CPU外圍驅(qū)動芯片組
c) 實時鐘,通訊接口
d) 總線系統(tǒng),用來連接主機板和各種外圍系統(tǒng)支持板,接口板等。主要有STD總線,工業(yè)PC總線,VME總線等
e) 在實時內(nèi)核上運行的各種控制算法(U/F控制,矢量控制,直接轉(zhuǎn)矩控制,無速度傳感器控制等)
3) 功率開關(guān)器件
功率開關(guān)器件通過根據(jù)來自微處理器板的控制信號控制大功率輸出器件的關(guān)斷和導通,來實現(xiàn)對交流電機的輸出電流和電壓的控制。根據(jù)控制方式的不同,其輸出方式由方波輸出逐漸發(fā)展到PWM輸出或SPWM輸出。開關(guān)器件也由原來的GTR,MOSFET,發(fā)展到IGBT,IPM等。參見下面的典型IGBT逆變輸出電路。
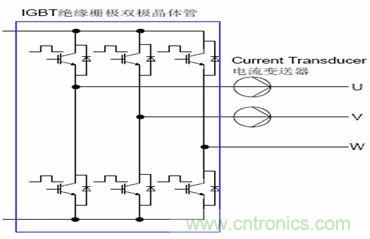
圖2
4) 接口和外圍設備
接口和外圍設備主要用來連接外部的輸入裝置和數(shù)字控制系統(tǒng)的各種數(shù)字量,模擬量等被控量的反饋信號。
a) 數(shù)字輸入輸出接口,主要分為并行輸入輸出接口擴展和串行輸入輸出接口擴展,主要用來擴展系統(tǒng)外部存儲器和數(shù)字量的輸入輸出。
b) 模擬量輸入輸出接口,主要分為數(shù)/模轉(zhuǎn)換器和模/數(shù)轉(zhuǎn)換器。來自微處理器的數(shù)字量控制信號經(jīng)過D/A轉(zhuǎn)換成模擬量信號輸出到外圍控制部件,同樣系統(tǒng)外部的各種傳感器信號(電壓,電流,溫度等)也經(jīng)過A/D轉(zhuǎn)換成數(shù)字量信號經(jīng)過總線系統(tǒng)傳送到CPU中進行相應的控制。
c) 通信接口,主要分為并行通信和同步或異步串行通信。使用通信接口可以將多個處理器系統(tǒng)連接起來實現(xiàn)故障診斷,軟件監(jiān)控,多臺交流電機聯(lián)動控制等功能。
d) 鍵盤與顯示接口,用來實現(xiàn)人機交互。
5) 信號檢測及處理
采用閉環(huán)控制的數(shù)字控制系統(tǒng)必須實時檢測被控對象的各個參變量,然后反饋給主CPU。交流電機的主要檢測物理量為,電機電樞溫度,定子電流,電子電壓,電機轉(zhuǎn)速,電機位置等。
a) 電流檢測主要采用采樣電阻法,電流互感器法和霍爾元件檢測法。
b) 電壓檢測主要采用電阻分壓法,電壓互感器法和霍爾傳感器法
c) 溫度檢測主要采用熱電阻和熱開關(guān)繼電器等元件
d) 電機位置和速度檢測主要采用測速電機和位置編碼器等反饋形式。其中位置編碼器可以根據(jù)實際使用的要求分別選用旋轉(zhuǎn)編碼器,光電編碼器等多種類型。
一般數(shù)字系統(tǒng)的構(gòu)成框圖請參見圖3:

圖3
[page]2. 異步電機調(diào)速通用控制方法:標量控制,矢量控制,無傳感器控制,直接轉(zhuǎn)矩控制的原理介紹及功能特點分析。
標量控制是指對只對交流異步電機的輸入電壓和輸入頻率進行幅值的控制,不考慮電機中各物理量之間的相互耦合效應。這里以標量控制中典型的U/F方式為例介紹其工作原理。
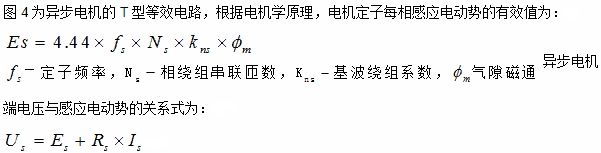
在交流電機的控制過程中,為了充分利用鐵芯,電機在額定運行時設計磁通處于接近飽和的工作點,所以必須控制電機的每極磁通在電機工作過程中保持基本不變。由上面兩式可知只要同時協(xié)調(diào)控制控制Es和Fs就可以達到上述控制要求。

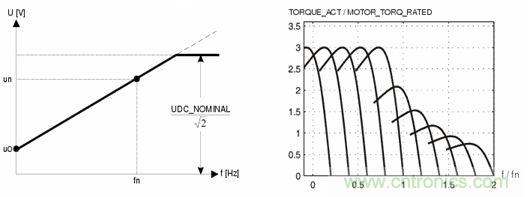
圖5
2) 電機工作在額定頻率以上
當電機在額定頻率以上調(diào)速時,逆變器的輸出頻率可以繼續(xù)升高,但是輸出端電壓只能維持在額定輸入值,此時定子磁通和調(diào)速頻率成反比下降,異步電機的工作狀態(tài)等同于直流電機的弱磁升速,電機的輸出扭矩隨磁通變化,輸出扭矩隨速度增加逐漸變小為恒功率工作模式。
標量控制模式除了上面介紹的U/f模式外還有帶轉(zhuǎn)差率調(diào)節(jié)的速度控制模式,帶轉(zhuǎn)矩和磁鏈控制的速度控制模式等,這些控制模式控制特性有所改善,但本質(zhì)還是標量控制。標量控制在技術(shù)上比較容易實現(xiàn),也不需要高速高性能的DSP處理器等的昂貴硬件,但是標量控制由于只是對電壓和頻率等變量的幅值進行控制,沒有考慮異步電機是一個多變量耦合關(guān)聯(lián)的非線性系統(tǒng),異步電機內(nèi)轉(zhuǎn)矩和磁鏈是電壓和頻率的函數(shù)。當系統(tǒng)對異步電機進行高動態(tài)控制時(快速控制電機的輸出扭矩)由于電機磁鏈的響應比較緩慢,當電機轉(zhuǎn)差率增加時,磁鏈趨于減少,輸出轉(zhuǎn)矩無法快速增加,導致系統(tǒng)的動態(tài)特性比較差。另外當電機工作在偏離額定轉(zhuǎn)速的低頻狀態(tài)時,由于無法準確保持磁鏈穩(wěn)定,導致電機或者輸出扭矩下降,或者由于磁鏈飽和而導致銅損鐵損增加。
矢量控制是指根據(jù)電機運行狀況同時控制輸出量的幅值和相位。其基本的工作原理是通過電機內(nèi)以同步轉(zhuǎn)速旋轉(zhuǎn)的參考d-q參考坐標系的數(shù)學方法,解藕出控制電機勵磁方向的電流分量Id和控制電機的轉(zhuǎn)矩方向的分量Iq,從而可以將異步電機的控制方法等效為傳統(tǒng)直流電機的控制。
直流電機忽略電樞效應和磁場飽和時,其扭矩表達式如下:
異步電機矢量控制的方法克服標量控制的系統(tǒng)動態(tài)特性差,低速扭矩特性差,電機損耗大的許多缺點,使交流異步電機的控制特性和直流電機的特性相當。缺點是系統(tǒng)結(jié)構(gòu)復雜需要高速的DSP處理器來完成復雜的控制運算,提高了系統(tǒng)的硬件成本和開發(fā)成本。
無速度傳感器控制模式其核心還是前面所述的矢量控制技術(shù)。基于磁場定向的矢量控制技術(shù)必須依靠準確的電機速度反饋值,在實際的工業(yè)使用過程中由于安裝速度傳感器會帶來系統(tǒng)硬件成本增加,系統(tǒng)可靠性降低,安裝維護工作量增加等不利因素。因此在實際的工業(yè)控制中開發(fā)了基于電機運行參數(shù)轉(zhuǎn)速自動識別電機轉(zhuǎn)速的無傳感器矢量控制方法。
目前使用的轉(zhuǎn)速估算方法有一下幾種:
1) 轉(zhuǎn)差頻率計算法
2) 基于狀態(tài)方程的直接綜合法
3) 模型參考自適應系統(tǒng)(MRAS)
4) 速度自適應磁鏈觀測器
5) 擴展卡爾曼濾波器(EKF)
6) 轉(zhuǎn)子齒諧波法
7) 凸極高頻信號注入法
各種不同的速度辨識的方法各有其優(yōu)點和缺點,無速度傳感器控制方法的主要問題在于系統(tǒng)魯棒性較差,速度的辨識精度比較依賴于電機的參數(shù),當電機在低轉(zhuǎn)速運行或工作在堵轉(zhuǎn)狀態(tài)時速度計算值偏差較大。在實際的工業(yè)應用過程中往往會在控制系統(tǒng)中使用一種或兩種以上的控制方法來達到比較滿意的控制效果。
直接轉(zhuǎn)矩控制方法是用空間矢量的分析方法直接在定子坐標系下計算和控制交流電機的轉(zhuǎn)矩,省去了矢量控制算法中解藕和旋轉(zhuǎn)坐標轉(zhuǎn)化等復雜的運算過程,通過雙位模擬調(diào)節(jié)器產(chǎn)生PWM信號,直接控制逆變器的功率器件的開關(guān)狀態(tài)來達到電機輸出扭矩的高速動態(tài)控制。直接轉(zhuǎn)矩控制的基本工作原理就是根據(jù)當前電機的扭矩計算值,通過電壓空間矢量來控制定子磁通的旋轉(zhuǎn)速度,從而改變轉(zhuǎn)子磁通的夾角,使電機的輸出扭矩得到高速的動態(tài)控制。直接轉(zhuǎn)矩控制沒有使用復雜的矢量變化算法,計算過程相對簡潔,控制方式直接,電機扭矩的動態(tài)特性好,其控制特性和矢量控制方法接近,缺點是電機控制存在磁鏈和轉(zhuǎn)矩脈動。



