
【導讀】毫米波(mmWave)傳感器通過兩種方式實現邊緣智能。首先毫米波可提供距離、速度和角度等獨特的數據集,同時具有反射不同目標的能力,這使傳感器能夠探測所需范圍內不同物體的特征。其次,毫米波傳感器通過芯片上處理實現邊緣智能。
但隨著連接到云端的傳感器數量日益增加,對網絡帶寬、云端儲存和數據處理的系統要求也迅速提高;位于邊緣的智能處理可以減少發送到中央服務器的數據量,增加傳感器本身的決策量。這可以在提升系統可靠性的同時,減少決策延遲和網絡成本;人們最不愿意看到的,應該就是當服務器停止工作,傳感器會無法檢測物體和做出決策。
邊緣智能和連接
毫米波(mmWave)傳感器通過兩種方式實現邊緣智能。首先毫米波可提供距離、速度和角度等獨特的數據集,同時具有反射不同目標的能力,這使傳感器能夠探測所需范圍內不同物體的特征。例如速度數據可使傳感器看到微多普勒效應(micro-Doppler)──來自微小運動的調變效應──其包含目標物件的典型特征,例如自行車車輪的旋轉輻條、行人搖擺的手臂或者動物奔跑的四肢;系統可以使用該數據來分類和識別傳感器視野中的各種物件類型。
減少錯誤檢測
其次,毫米波傳感器通過芯片上處理實現邊緣智能;內含微控制器和數字信號處理器(DSP)的傳感器能夠執行初級雷達處理(low-level radar processing),以及特征檢測和分類。
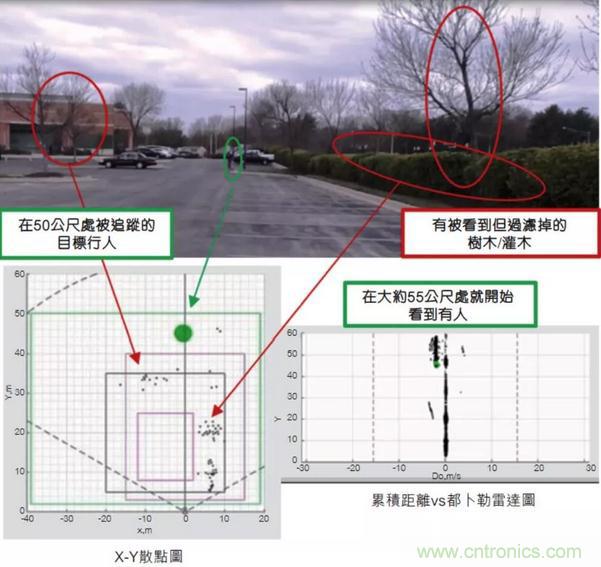
圖1:用于長距離室外入侵探測器的芯片上過濾范例
圖1顯示了在一項安防應用中,使用芯片上智能算法在50公尺室外入侵探測器的一項實驗結果。入侵探測器用于確定是否有人進入受保護區域,例如貨運場、停車場或后院。一些仰賴光學或紅外線感測的探測器,可能會檢測到附近樹木和灌木的錯誤運動。而毫米波傳感器使用處理和算法來濾除和防止錯誤的檢測,僅在人體運動時觸發探測器。安防攝影機和可視門鈴(video doorbells)可以通過聯網服務器處理圖像信息,執行相同的錯誤檢測過濾;但這些基于服務器的系統所提供的功能通常需要使用者付費,毫米波技術則可實現在傳感器本身進行決策,無需聯網服務器。
圖2顯示了使用毫米波技術的入侵探測;毫米波傳感器分析場景中物件的速度,過濾出移動背景中的運動,僅追蹤人物。
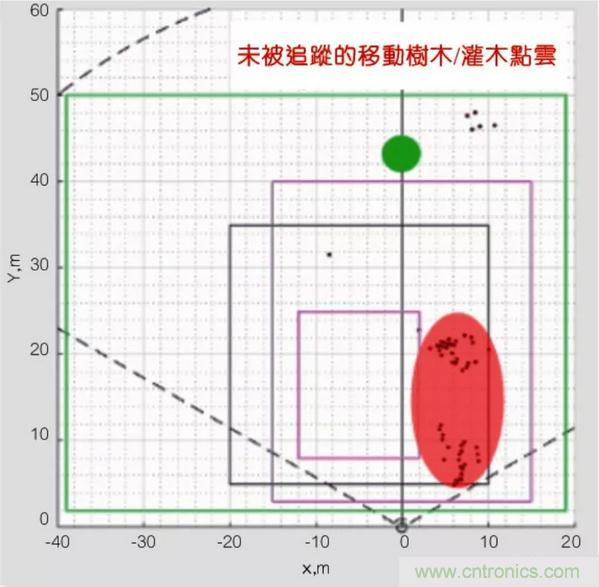
圖2:來自室外入侵應用的動畫點云,黑點表示移動的物件,包括人、樹木、灌木;該算法將人顯示為綠色,同時過濾掉其它移動物件
圖3顯示了行走的人和擺頭風扇的微多普勒特征差異;一旦識別出區分兩個物件的正確特征,分類器就會在設備上即時進行區分。
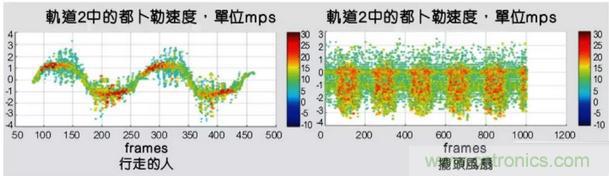
圖3:兩張圖顯示了行走的人和擺頭風扇隨時間推移的微多普勒信息
圖4顯示了芯片上處理如何使毫米波傳感器根據其特征即時識別目標并進行分類;這些特征可以是根據尺寸、反射率、微多普勒效應或是其它特征,并且可以幫助識別典型的行為,以辨別不同的移動物件。例如分類功能可在室內或室外保全應用中識別人和動物,在家庭自動化系統中區分兒童和成人,或確定人在限制區域內是跑步還是行走。
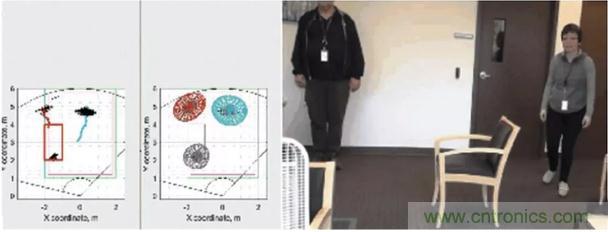
圖4:使用毫米波傳感器執行分類的范例:中間圖上所有移動目標都分配了一個軌道,其中的每個彩色區域代表一個人
邊緣處理和智能可以成為強大的工具,有助于提高物聯網傳感器、網絡的品質和穩健性。具有整合處理功能的毫米波傳感器,能夠在邊緣實現智能,通過對物件進行過濾和分類,更智能地識別場景中發生的事情并即時做出決策,從而解決錯誤檢測問題。
來源:德州儀器



