

【導讀】智能汽車硬件系統(tǒng)的核心就是電路系統(tǒng),硬件電路系統(tǒng)的穩(wěn)定性是整個系統(tǒng)的性能指標。智能車屬于輪式移動機器人,集環(huán)境感知、路徑規(guī)劃、自動駕駛等多功能于一體。智能汽車的能動性、中心、電路板的緊湊型都是硬件電路必須要考慮的因素。
智能汽車技術將許多領域聯(lián)系在一起,如計算機科學、人工智能、圖像處理、模式識別和控制理論等。智能汽車與一般所說的自動駕駛有所不同,它更多指的是利用GPS 和智能公路技術實現(xiàn)的汽車自動駕駛。這種汽車不需要人去駕駛,因為它裝有相當于人的“眼睛”、“大腦”和“腳”的電視攝像機、電子計算機和自動操縱系統(tǒng)之類的裝置,這些置都裝有非常復雜的電腦程序,所以這種汽車能和人一樣會“思考”、“判斷”、“行走”,可以自動啟動、加速、剎車,可以自動繞過地面障礙物在復雜多變的情況下,能隨機應變,自動選擇最佳方案,指揮汽車正常、順利地行駛。
電路系統(tǒng)是智能汽車硬件系統(tǒng)的核心,對于本硬件電路系統(tǒng)而言,穩(wěn)定性是需要優(yōu)先保證的性能指標,畢竟跑完全程才是取得成績的前提。在此基礎上,還應當綜合考慮智能汽車的動力性、重心及電路板的緊湊性等其他指標。
電機驅動模塊
電機驅動模塊為智能汽車的行駛提供動力,它的性能直接影響到后輪電機的控制性能,包括加速、減速與制動等性能。本文采用MOSFET 驅動芯片加全橋驅動方案,只需合理的選擇MOSFET驅動芯片和功率MOSFET 以保證性能即可。電路圖如圖1所示。
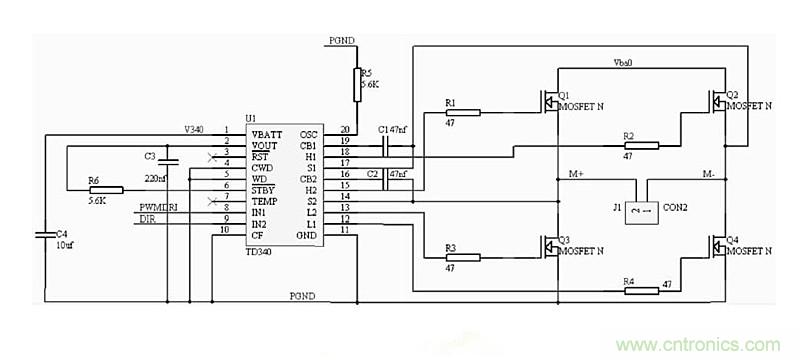
圖1
舵機負責智能汽車的轉向,舵機模塊能否穩(wěn)定工作直接影響到智能汽車在賽道上高速行駛時的穩(wěn)定性以及轉向時的靈敏度和精確度。舵機工作原理為:舵盤角位由單片機發(fā)出的PWM 控制信號的脈寬決定,舵機內部電路通過反饋控制調節(jié)舵盤角位。由于自身即為角度閉環(huán)控制,而且性能較好,故系統(tǒng)中就不必考慮外加舵機閉環(huán)。舵機驅動模塊電路如圖2所示。舵機驅動模塊同樣屬于功率部分,用6N137光耦進行信號隔離。
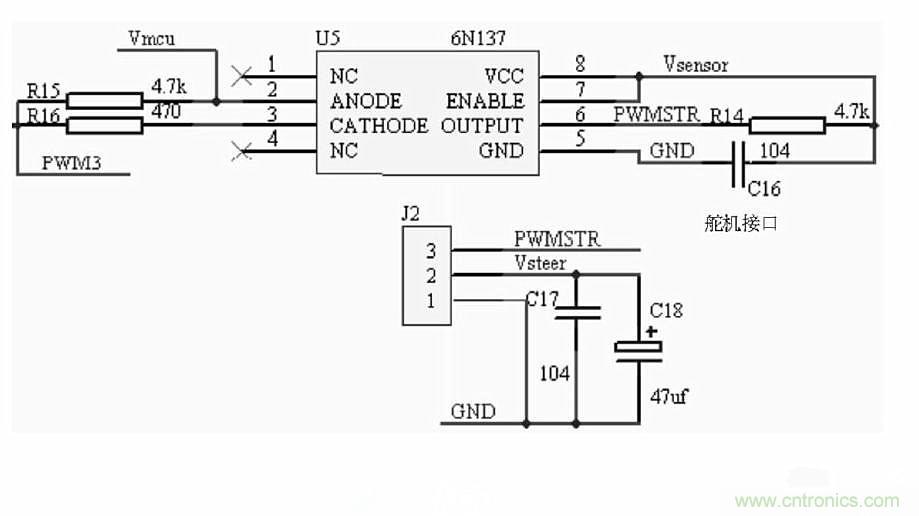
圖2
相關閱讀:
“步步驚心”步進電機控制系統(tǒng)的設計步驟詳解
3大三相無刷直流電機控制和驅動系統(tǒng)方案對比
專家精講:計算體系結構的三種電機控制

