
中心論題:
- 介紹交流伺服電動機內部會產生的振蕩類型
- 為消除振蕩有相位滯后補償濾波器、陷波濾波器、速度反饋濾波器三種濾波器可供選用
- 具體介紹濾波器的調試設定步驟
解決方案:
- 按照文中所述調試步驟對電動機進行調試直到消除振蕩為止
- 在調試的過程中須反復實驗觀察,根據使用要求靈活應用
交流伺服電動機的應用已很普遍。許多國家,許多公司的產品在國內都有銷售。國內先從控制器開始開發,再到驅動器,現在也有類似的電動機出現在市場上。隨著技術完善,價格降低,控制性能的提高,操作調試日趨簡單,以及系列化、模塊化不斷發展,用它取代其他類型的伺服控制電動機已成一種趨勢。
直接驅動電動機(d-d motor,dynaserv)因其不需要減速器而在某些特定場合得到廣泛的應用,相當于我們稱作的力矩電動機,只不過前者是用新型的交流電動機原理,是數字控制式的。現用橫河公司(yokogawa)的智能驅動器drvgⅲ為例介紹它的濾波器。該驅動器為較新型的型號,可以較全面的概括其他型號的用法。
振蕩類型
不穩定現象主要有下列幾種:
1)調整振蕩
低頻振蕩,頻率幾赫茲,振蕩幅度幾度到幾十度,有時超出控制區。由位置控制頻率帶寬和速度控制頻率帶寬失衡引起,如速度控制頻率帶寬小于位置控制頻率帶寬3倍。也可以是自動調整時慣量力矩值不合適,如大于1.5倍時。可以反復執行自動調整操作并檢查慣量值,其誤差不能大于20%。或降低#0參數設置值(伺服剛度設置參數)。
2)爬行
振動現象類似于調整振蕩。當執行低速運行指令時,反復一走一停,是靜摩擦力大于低速時的動摩擦力導致。原因是位置積分限制值太大,位置偏差太大從而使控制系統不穩定。方法是調整“積分限制值”或增加系統剛度。
3)相移振蕩
振蕩頻率為幾十到200hz,振蕩幅度不低于幾十度。原因是速度輸出信號相位落后于速度輸入信號相位180°,由控制理論可知這時系統無穩定裕量。當各種濾波器使用相同的頻率或速度控制帶寬和濾波器頻率帶寬相同時都可引起這種振蕩。處理方法為降低#1參數設置值(伺服剛度設置參數)。
4)諧振
振蕩頻率為幾十到2khz,振蕩幅度頂多幾度,依結構而定。振幅小而頻率高,常可聽到震顫噪音,系統剛度小易引起這個現象。引起原因是負載的機械諧振擾動進入速度控制環,多數情況下有幾個諧振頻率。所以設計系統時機械諧振頻率應盡量高,至少要高于系統控制帶寬5倍以上,結構設計時注意剛性設計,避免細長桿結構。可調整濾波器抑制頻率諧振點增益來解決。
濾波器
為消除振蕩有三種濾波器。根據具體情況選用。
a.相位滯后補償濾波器
為一階延遲濾波器,由于它可調節帶寬的頻率,增加阻尼,在減少相移上優于速度反饋濾波器。

圖1 相位滯后補償濾波器bode圖
由圖1的bode圖可看出它比速度反饋濾波器多一個一階微分環節用于補償相位損失,參數#24對應積分常數,參數#25對應微分常數。并且最大增益衰減點頻率可設置,使相位滯后減到最小。另外,相對于陷波濾波器,它對抑制頻率范圍寬的諧振效果好,因其幅度抑制值小,對峰值高頻帶窄的諧振不合適。
注意如果速度控制帶寬和一階補償濾波器的頻率設置太接近容易引起振蕩。
b.陷波濾波器
陷波濾波器又稱為帶阻濾波器,可對任意頻率信號有效地阻斷,甚至可使諧振點的增益降到零。當諧振峰值高而頻率帶寬窄時適用。通過改變品質因數(q值)使衰減特性變化急劇或平緩。頻率設置范圍從50~1500hz,q值設置范圍從0.5~2.5(默認值1.5)。圖2示出了陷波濾波器設置圖。
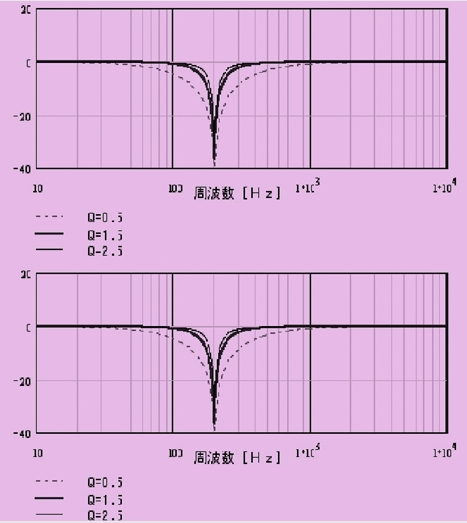
圖2 陷波濾波器設置圖
在諧振頻帶太寬時該濾波器不能濾除干凈。
c.速度反饋濾波器
速度反饋濾波器也為一階延遲濾波器,這是一個純粹的慣性環節,相移趨于90°。在高頻時增益小,當高頻處有幾個諧振點時適用。增益在-3db規定為帶寬頻率,設置范圍從50~1000hz(見圖3)。注意使用時相移可到90°,可能會發生相移引起的振蕩。
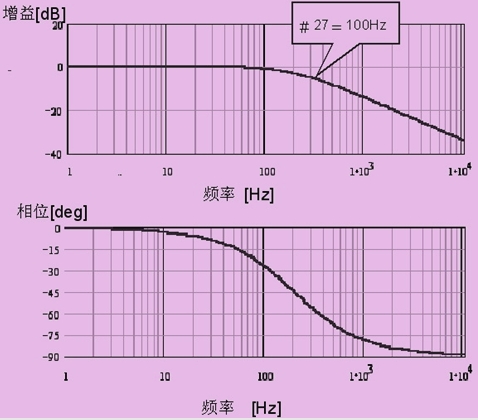
圖3 速度反饋濾波器bode圖
調試設定步驟
1. 先調陷波濾波器1和2使其振蕩值到最小,如果無效果就關閉該濾波器。
2. 再調整相位滯后補償濾波器。
#24= n×#2
#25= 4×#24
參數#24為一階滯后補償頻率#1;
參數#25為一階滯后補償頻率#2;
參數#2為速度控制帶寬#1。
設置參數#24用n=3,n=2,n=1來試,不能使振蕩停止就關閉該濾波器。
3. 減低參數 #1的值(伺服剛性設置)。返回到步驟1。反復調整直至滿意。
若自調整時出錯,可將負載慣量設置為零,并增加自調范圍(參數#51,自調模式執行范圍)。若自調整時振蕩則降低伺服剛度直到諧振停止。再重復執行自調整,濾波器調整。
各種型號的這類電動機和驅動器均有它自己的調試、控制和設置參數的軟件界面,或對控制器,或對驅動器,但都大同小異,這里不做介紹。在調試的過程中須反復實驗觀察,根據使用要求靈活應用。例如在對一個由這類電動機構成的轉臺測試設備,測量時對轉速穩定要求嚴格,而對加速度并不做嚴格要求,只要加速區不是太長就行,被測對象種類較多,重量、慣量、剛度各不一樣,并且更換被測對象頻繁。使用自動調整,在加載,空載,或換負載對象時常發生諧振,要重新執行自動調整才行。為此筆者將系統增益降低,使輸出特性硬度減低,犧牲快速性而增加穩定性,使各種負載時均不振蕩也不降低測量精度。在另一套系統中筆者甚至將帶阻陷波濾波器硬件斷開,拔去連接插頭,才能使系統穩定。



