
【導讀】在無刷直流電機BLDC控制里,無論對于帶傳感器還是無傳感器電機,經常會用到超前角/導通角(Lead Angle)。因為電機線圈是感性負載,所以相對于線圈上的加載電壓,線圈里的電流會有一定的時延,這會影響電機的效率和產生噪音震動等。
對于BLDC的梯形波/方波控制,調試并選取合適的超前角能在不改變基本控制算法的情況下,明顯提升電機控制的效率和震動噪音水平。特別對于帶傳感器電機,控制時序里的超前角相當于調整電機內部的傳感器位置,從而通過用簡單易行的軟件方法實現等同于以不方便或困難的方式調整傳感器物理位置的效果。
1、三相BLDC控制原理(梯形波)
下圖表示了無刷電機梯形波控制算法的基本原理。首先,交流電整流為直流電壓,后級為變頻部分(inverter),包含6個開關器件(FET):上橋臂的U、V、W和下橋臂的X、Y、Z。
按照一定順序控制這些FET開關器件,比如:
1:U->Y
2:U->Z
3:V->Z
4:V->X
5:W->X
6:W->Y(假定電機方向為正轉)
那么電流會按照下面的順序流過電機線圈:
1:U相到V相(U->V)
2:U相到W相(U->W)
3:V相到W相(V->W)
4:V相到U相(V->U)
5:W相到U相(W->U)
6:W相到V相(W->V)
共6步,如此循環。(如圖1所示)
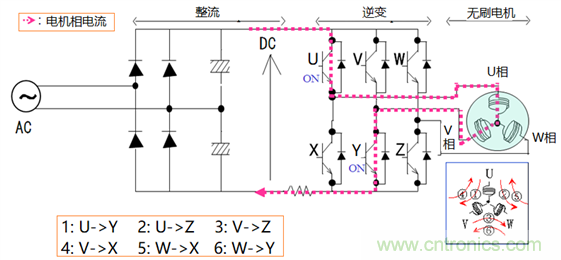
圖1
同理,若電機方向為反轉,則開關順序為:
1:U->Z
2:U->Y
3:W->Y
4:W->X
5:V->X
6:V->Z
這就是無刷電機BLDC的梯形波/方波控制算法。
2、三相BLDC控制時序
無刷電機的控制時序依賴于電機轉子位置,為方便說明超前角/導通角,這里以帶霍爾傳感器的電機為例。按照霍爾芯片的位置判斷,反饋應為中斷。每檢測到一個有效的霍爾位置信號編碼(Pattern),就開始換相到下一步,然后接著開始檢測下一次的位置反饋中斷。如下圖2。按照上述6步不斷換相的順序:
1:U->V
2:U->W
3:V->W
4:V->U
5:W->U
6:W->V
再循環往復。
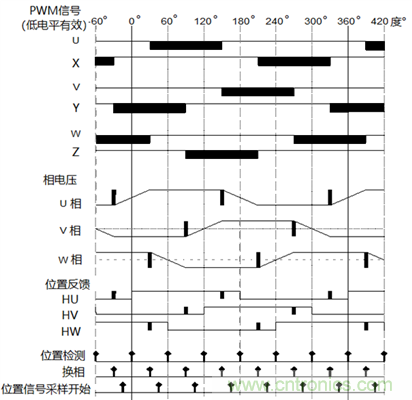
圖2
在每次檢測到霍爾位置Pattern時,換相并輸出對應的脈寬調制(PWM - Pulse Width Modulation)Pattern。之后,對位置反饋信號開始采樣監控,直到再次檢測到有效的霍爾位置Pattern。
圖中PWM開關信號(U~Z)中的黑色區塊為有效電平,內含PWM載波(從幾K到幾十KHz,Duty可變)。圖中的相電壓(U相~W相)中的黑色窄柱狀波形是在此換相時刻(從此一步切換到下一步PWM Pattern),由于續流等原因(電機線圈的電感)造成的換相電壓跳變。
3、超前角
在無刷直流電機(BLDC - BrushLess DC)控制里經常會用到Lead Angle,即超前角/導通角。因為電機線圈是感性負載,所以相對于線圈上的加載電壓,線圈里的電流會有一定的時延,從而影響電機的效率和產生噪音。以電機U相電壓舉例,把上圖PWM信號U、X和U相電壓波形放大,如下圖。其中U相展開可看到實際電壓波形,內含PWM載波。忽略PWM載波看包絡圖,如下圖3最下面波形所示。
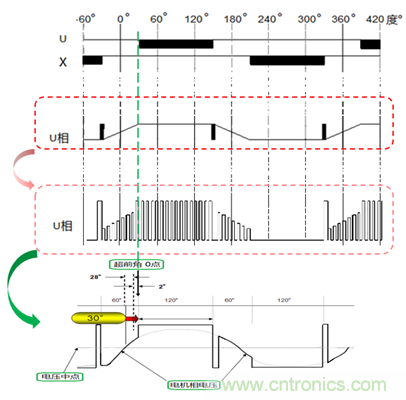
圖3:U相展開時實際的電壓波形
這里,綠色虛線處是換相點,定義為超前角/導通角0度點。該點位于相電壓中點右邊(后邊)30度。而Lead Angle超前角/導通角,顧名思義就是從超前角0度往左(往前)提前多少度。
一般來說,特別是無刷電機BLDC梯形波控制算法,在電機高轉速情況下,需要在每個換相點前對6個PWM輸入信號(U~Z)插入一定的Lead Angle超前角/導通角,圖4是不同超前角/導通角,從0度、7.5度、15度到30度,所分別對應的輸入信號。
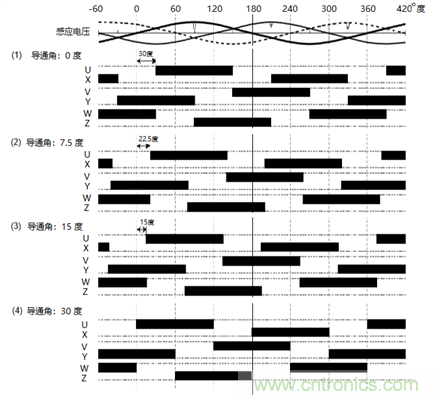
圖4
超前角/導通角的調試取決于電機本身參數、電機電壓以及電機轉速等。一般從經驗來說,對于相同電機,在給定的電壓下,電機的轉速越高,那么就需要更高的超前角/導通角。調試合適的Lead Angle的關鍵方法就是在電機帶負載情況下,在感興趣的工作轉速(或范圍)下找出電機效率最高(輸出功率/輸入功率)、電機噪音和震動最小的情況。
對于帶霍爾傳感器的電機來說,調整霍爾傳感器的物理位置(對應到電子角度)也能起到類似效果。而一般來說,霍爾傳感器位于電機內的PCB板上,不太容易調整。反過來說,通過調整Lead Angle超前角/導通角,只要對應好物理角度和電子角度(取決于電機轉子的極對數)關系,也能起到類似修正電機內部霍爾傳感器物理位置的作用,從而通過簡單易行的軟件方式(超前角/導通角的調整)實現等同于以不方便或復雜的方式調整傳感器物理位置的效果。
推薦閱讀:


