

【導讀】人從外界獲取信息必須借助于感覺器官,但機器人沒有感覺器官,只能依賴傳感器了。機器人的終極目標與人無限接近,那到底要裝多少傳感器,機器人才能更像人一點呢?
機器人的視覺、力覺、觸覺早已進入實用階段,而且他的感官,如聽覺、嗅覺、味覺、滑覺等還等待攻克——研究出對應的傳感器。
機器人獲取外界信息、解析周邊環境并作出相應反應的“五官”,正是傳感器。
用專業的術語來解釋,傳感器其實就是一種檢測裝置,感受到被測量的信息,并能將感受到的信息,按一定規律變換成為電信號或其他所需形式的信息輸出,以滿足信息的傳輸、處理、存儲、顯示、記錄和控制等要求。
通俗來說,大致分為幾步:“感應”信息,“收集”信息,然后“做出”反應。

只有五官遠遠不夠,機器人有這么多傳感器
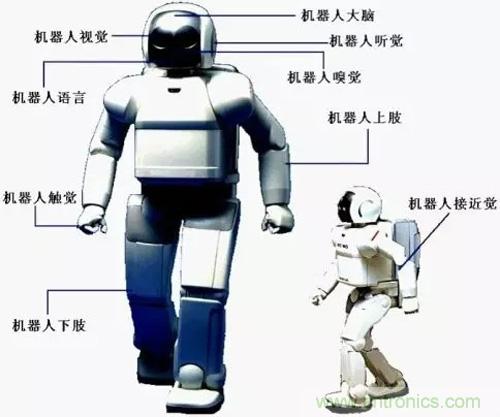
最受關注的人類5大感覺器官,如果用傳感器相比擬的話,可以簡單做一些歸類:
視覺——光敏傳感器;
聽覺——聲敏傳感器;
嗅覺——氣敏傳感器;
味覺——化學傳感器;
觸覺——壓敏、溫敏、流體傳感器。
然而,機器人只有五官遠遠不夠,一般可以這樣說,感官越豐富的機器人,其內部就會有越多的傳感器。換句話說,如果你的機器人并不是那么靈敏,也許就是因為少了傳感器。
那么,機器人到底應該有多少傳感器,才能了真正做到靈敏如人類呢?
按照傳感器的用武之地,即檢測對象,可以簡單將傳感器簡單分為內外兩部分。
內部傳感器,又稱為體內傳感器,主要用于檢測機器人各內部系統的狀況,如各關節的位置、速度、加速度溫度、電機速度、電機載荷、電池電壓等,并將所測得的信息作為反饋信息送至控制器,形成閉環控制。
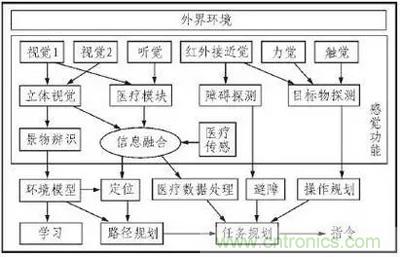
外部傳感器,又稱為外界傳感器,用于獲取有關機器人的作業對象及外界環境等方面的信息,是機器人與周圍交互工作的信息通道,是用來執行視覺、接近覺、嗅覺、聽覺等傳感器,比如距離測量、聲音、光線等。
根據運行方式,傳感器也可以分為被動式傳感器和主動式傳感器。被動式傳感器是指本身不發出能量,靠捕獲外界光線來獲得信息的傳感器,如CCD;主動式傳感器就是那些有自主性的傳感器了,它們能發出探測信號,如紅外等。
這些分類方式除了能把機器人里一堆傳感器做有效分類,更重要的原因是,能根據機器人哪里“不適”而倒推找到出問題的環節,就跟根據病癥找原因是一個道理。
哪兒出了問題?傳感器是個很好的線索
在做一個機器人之前,首先一定要了解自己手中都有哪些素材,而這些材料又起什么作用。誠如舵機起馬達的作用,那么,傳感器就起檢測的作用,一般可以從幾個指標來檢驗:
動態范圍:是指傳感器能檢測的范圍。比如電流傳感器能夠測量1mA-20A的電流,那么這個傳感器的測量范圍就是10log(20/0.001)=43dB.如果傳感器的輸入超出了傳感器的測量范圍,那么傳感器就不會顯示正確的測量值了。比如超聲波傳感器對近距離的物體無法測量。
分辨率:分辨率是指傳感器能測量的最小差異。比如電流傳感器,它的分辨率可能是5mA,也就是說小于5mA的電流差異,它沒法檢測出。當然越高分辨率的傳感器價格就越貴。
線性度:這是一個非常重要的指標來衡量傳感器輸入和輸出的關系。
頻率:是指傳感器的采樣速度。比如一個超聲波傳感器的采樣速度為20HZ,也就是說每秒鐘能掃描20次。
也就是說,假如你的機器人出現了聽不見的問題,那么你可以找到聲敏傳感器,然后從動態范圍、分辨率、線性度和頻率一一檢測到底是哪里出了問題。

有限的內部空間和越來越多的傳感器之間的矛盾
換一個角度,傳感器其實也相當于人類的神經末梢,所以可知,靈敏度與分布的密度有極大的關系。的確如此,因為對靈敏度的高要求,服務機器人必須攜帶更多的傳感器,所以,就牽涉出了未來的重要設計趨勢以及重大難題:
機器人有限的內部空間和人類對機器人無限感官的期待之間的矛盾。就像人民群眾日益增長的物質文化需求同落后的社會生產之間的矛盾一樣,人類對于機器人的靈敏度要求就像人民的物質文化需求一樣日益增長,但是機器人的內部空間又極為有限。
曾經采訪一個掃地機器人設計師時,他重點提到了掃地機器人的內部空間的留白問題,除了不美觀顯得技術LOW以外,更重要的原因是,必須把有限的空間用在刀刃上,一毫米都不能浪費。
這個世界難題也困擾了世界很多設計師。除了把傳感器做得更薄,他們也正在往“一個傳感器多個功能”的方向努力!




