
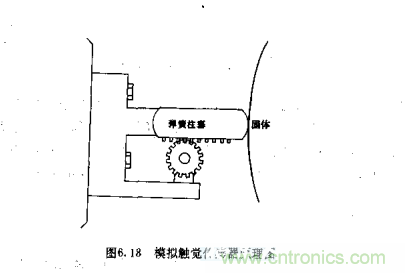
【導讀】模擬觸覺傳感器是一種柔順器件,它的輸出正比于局部力。圖6. 18所示,為這種器件的一 種最簡單的結構:一個彈簧加力桿與一個轉軸相連,由于橫向力引起的彈簧位移導致轉軸成比 例地旋轉。轉角可用電位計連續測董,或用碼盤作數字式測量。根據彈簧的彈性系數,便可求得 與位移相應的力。
過去幾年中;人們花費了很多精力開發蝕覺陣列,這種陣列能獲得比單個傳感器更大區域 的觸覺信息,圖6. 19說明了這種器件的應用,圖中示出了一個機械手,在每個手指的內表面都 復蓋了觖覺陣列.機械手外表商的傳感片是典型的二值器件,其功能已在6. 4.1節的結尾做了
雖然傳感陣列可由若干審個傳感器組成,但處理這一問題的最好方法暈構成一個由甩極 組成的陣列,電極與柔性導電材料(例如石墨基物質)保持電器接觸,導電材料的電阻隨力而 變化。這種器件往往稱為人造皮膚.當物體壓在其表面上時,將引起局部變形*測出連續的電阻變化,就可測量埼部變形,電阻的改變很容易轉換成電信號,其幅值正比于施加在材料表面上某一點的力。
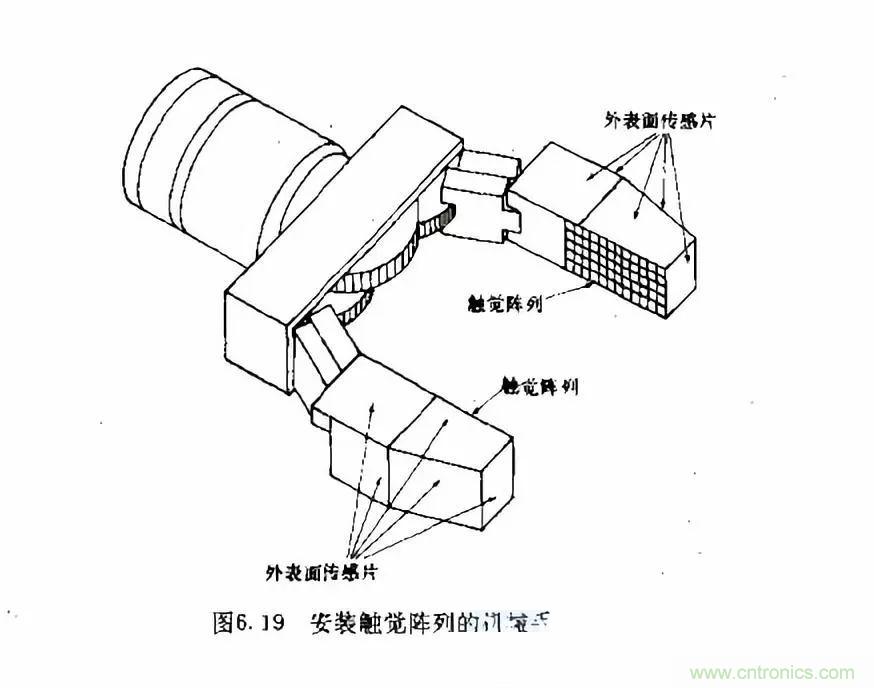
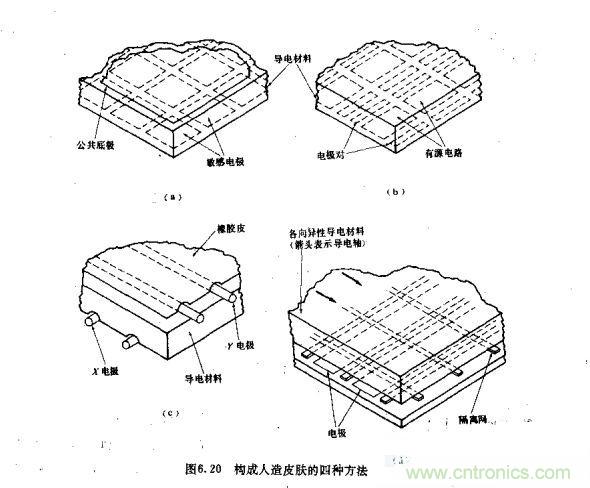
圖6.20給出了構成人造皮膚的幾種基本方法,圖6. 20a所示的方案基于“窗U”概念,特點 是在公共底板和電極陣列之間夾著導電材料,電極陣列蝕刻在一塊玻璃纖維印刷電路板上。每 個電極是一矩形區域(因此稱為窗口 ),該區域便構成一個觸點。從公共底板流向每個電極的電 流是導電材料所受壓力的函數。
圖6.20b所示的方法中,窄長的電極對和用大規模集電歸技術制怍的有源電路廠起放在同一基片上導電材料位乎_片的上面,除與電極相通,與基片的故它部分是絕緣的。測量由于材料受壓而引起的電阻變化,并由電極對之間的有源電路轉換成電信
圖6. 20c此所示為另一神可技的方法七這種方法中,導電材嵙位于龠畢直相交的細直韌性 電極硨列之間。中間用導電材嵙隔開的每個交點便是一個敏感點。可用如下方法測量由于材料受壓而引起的電阻變化:激勵一個陣列的電極(每次一個電極):,然后測量流過另一陣列單元的電流。每個單元上電流的幅值正比干該單元和受激單元間材料所受的壓力。
最后,因6. 20d所示方案需要使用一種各向異性的導電材料。這珅材料具有單向導電持性。這種傳感器由位于底板上的細$形電極的線狀陣列所構成導電材料位于該陣列上面,導 電方向垂直于電板并且用一網狀物將導電材料與電極分開,以保證在沒有外力怍用時它們之 間甲互相接觸。隨著力的增大,接觸面積也增大,使得電阻降低。號圖6.20c所示方法一樣,一 個陣列由外部激勵并測量另一陣列產生的電流.應當指出,觸覺靈敏度取擇于隔離用網狀物的厚度
圖6.20c和d所示的方法需要依次激廊其中一個陣列的元素,這種方法通常會產生一困難問題,即由于改變電流路徑會引起“交叉”感應,使得對復雜的接觸模式所輸出的信號難以作出準確的解釋。解決此問題的一種方法是、在每個交叉點處放一個二極管以消除流經其它路徑 的電流。另一種方法是除了被激勵的單元外,將所有其它路徑接地。逐個掃描接收陣列的路徑,我們基本上可以“看”到每個單元交叉點所起的作用。
到此為止,所討論的各種觸覺傳感器都涉及到測量垂直于傳感表面的外力。測量切向運 動,以確定是否有滑動,是觸覺傳感器另一重要應用。在結束本節前,我們簡要地介紹Bejczy [1980]所建議的用檢測滑動方向和大小的一神方法.圖6. 21所示的器件包括一個表面有凹陷可自由運動的小球,它可以使一個固定在導電盤軸上的細桿偏斜。在導電盤下均勻地放置若干電觸點,物體在球上滑動將導致球的旋轉,而球的旋轉則會使細桿和圓盤以一定頻率振動, 該頻率正比于球的轉速,轉動的方向確定哪個觸點與振動的圓盤接觸,相應的電路產生脈沖,分析得到的信號就可確滑動的平均方向 "
推薦閱讀:


