
【導讀】如果我們對測量精度要求非常高,就不能僅僅只是對單個傳感器進行修正,還要考慮三個傳感器的敏感軸是否嚴格的正交。很多時候我們需要仔細的調整三個傳感器的正交關系,但是將三個傳感器調整到完全正交是很難的,,這里介紹一種基本的軟件修正方法。它對大多數類型的傳感器都可以使用。
當需要測量的物理量為矢量時,我們需要使用三個正交放置的傳感器來分別測量物理量的各個分量,以此來合成一個完整的矢量。如果我們對測量精度要求非常高,就不能僅僅只是對單個傳感器進行修正,還要考慮三個傳感器的敏感軸是否嚴格的正交。很多時候我們需要仔細的調整三個傳感器的正交關系,但是將三個傳感器調整到完全正交是很難的,并且許多時候,由于設計等原因,這種機械上的調校是無法進行的。這時,軟件修正就成了必不可少的步驟,軟件修正大多數時候也比機械上的調校更簡單。
這里介紹一種基本的軟件修正方法。它對大多數類型的傳感器都可以使用。首先,假設單獨的每個傳感器的測量的值都是準確的,這可以通過預先對每個傳感器進行標定來完成。
這里設三個傳感器的測量值分別是 x1,x2,x3。這三個值可以合成一個列向量X:
所謂軟件修正算法,就是找到從 X到 Y 的映射。由解析幾何知識我們知道X到 Y 的映射可以通過一個線性變換C來表示:
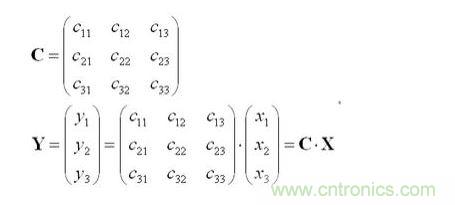
寫到這里其實方法就很明了了,我們只需要求得這個轉換矩陣C就一切都解決了。
轉換矩陣C如何求,當然是通過大量的測量數據來擬合。實驗數據的獲得很重要,最好能有個比較精密的三軸轉臺,這樣轉各個角度都比較方便。沒有也沒關系,但至少要能把裝配好的傳感器組沿三個已知的方向放置,并且這三個方向要擺放的很精確。通常,我們選的這三個方向是相互正交的,這三個方向上物理量的真實值就是上面式子中的y1、y2、y3,換句話說這三個方向是三個傳感器的名義上的取向,雖然這三個傳感器可能全都擺歪了。具體如何采集數據就不詳細描述了,由于未知參數有9個,至少要采集9組數據才行,條件允許的話當然是數據越多越好。
[page]
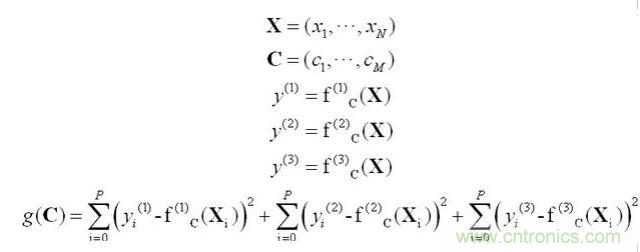
下面說說如何對采集到的數據進行擬合。通常我們遇到的最小二乘擬合問題的待擬合的函數都可以表示為:

這個問題已經有成熟的算法,各種常見的數學軟件,比如 Matlab、Mathematica、scilab、Lingo 等都有現成的程序包來完成這個計算。我們現在的問題難點在于 y 也是個向量,這就需要我們對上面的方法進行一點簡單的變形。簡單的說,我們實際上是有三個待擬合函數的,因此g(C)也要做相應的改變:
經過這樣轉化后就成了一個普通的最優化問題(函數求極值)了,各種數學軟件都可以方便的計算出結果。
這里再多說幾句,我個人喜歡使用 gnuplot,gnuplot中有個 fit 命令,也可以完成多元函數擬合。Gnuplot的 fit 命令采用非線性最小二乘 (NLLS) Marquardt-Levenberg算法,擬合能力非常強悍,只要擬合參數的初值給的別太離譜,基本都能夠收斂到最優解上。fit命令具體的用法可以參考gnuplot的幫助文件。這里只講講如何處理 y是多個值的問題,方法很簡單,就是通過多引入一個自變量,將多值函數改造成普通的函數:

這里需要注意的是如果a1,a2,a3成為未知數,c11,c22,c33就可以作為已知量了,比如設c11=c22=c33=1,因為這里的六個未知數只有三個是獨立的。因此,實際上只增加了三個未知數。
如果將上面的方法和溫度修正一起考慮的話可以這樣處理:
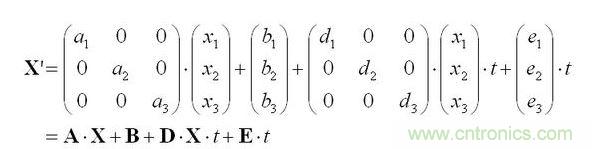
上面式子中的t是溫度,這里的溫度修正算法比較簡單,主要是為了盡量少引入未知的參數。后面的計算就沒什么不同的了。




